Digital I/Os The digital I/O are constructed in compliance with IEC 61131-2. The electrical
specifications are shown below.
Terminals Parameter Min Typ Max Unit
Digital Outputs
[COx / DOx]
Current* 0 - 1 A
[COx / DOx]
Voltage drop 0 - 0.5 V
[COx / DOx]
Leakage current 0 - 0.1 mA
[COx / DOx]
Function - PNP - Type
[COx / DOx]
IEC 61131-2 - 1A - Type
Digital Inputs
[EIx/SIx/CIx/DIx]
Voltage -3 - 30 V
[EIx/SIx/CIx/DIx]
OFF region -3 - 5 V
[EIx/SIx/CIx/DIx]
ON region 11 - 30 V
[EIx/SIx/CIx/DIx]
Current (11-30V) 2 - 15 mA
[EIx/SIx/CIx/DIx]
Function - PNP + - Type
[EIx/SIx/CIx/DIx]
IEC 61131-2 - 3 - Type
*For resistive loads or inductive loads of maximum 1H.
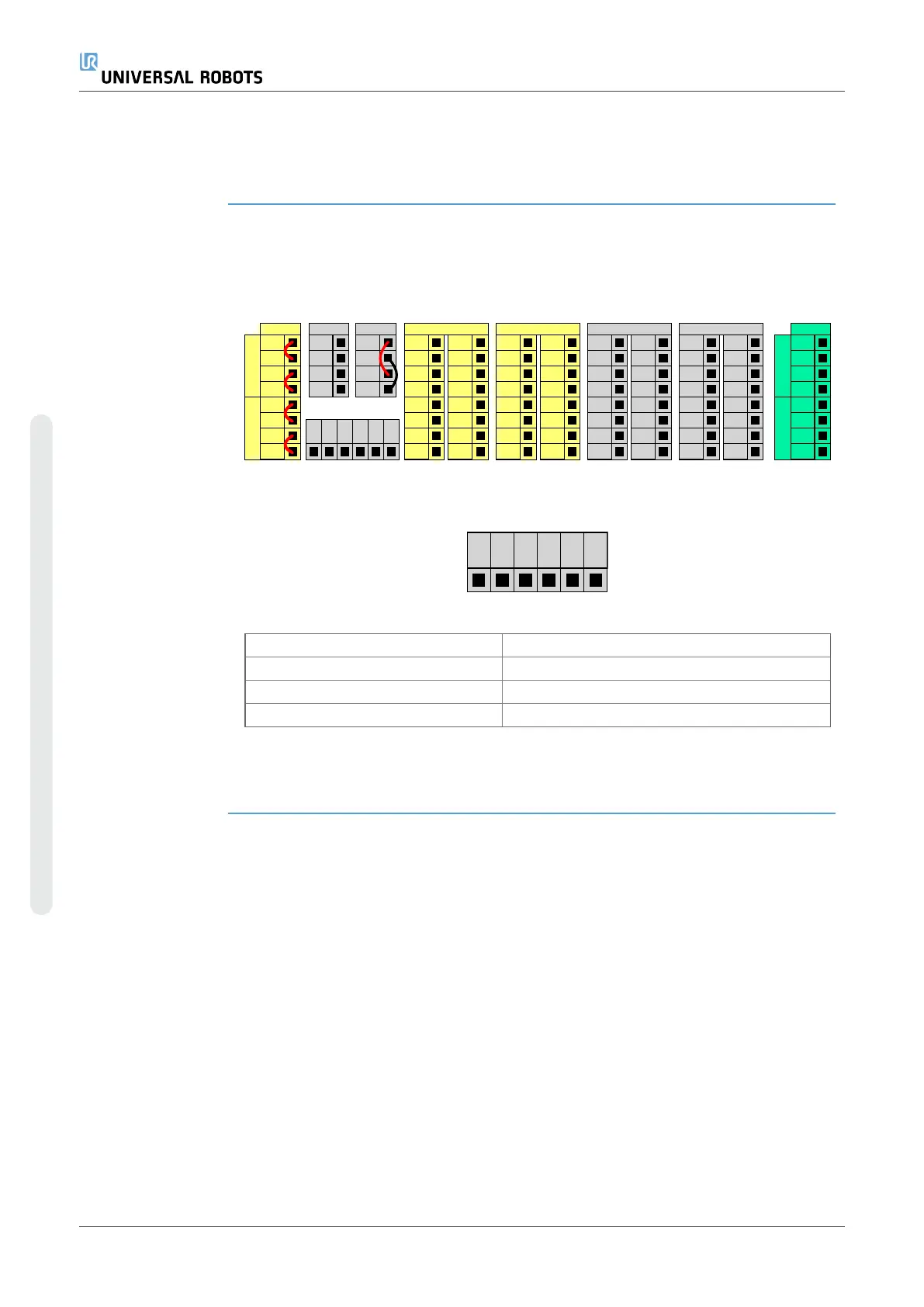
4.3. Safety I/O
Safety I/O This section describes dedicated safety input (Yellow terminal with red text) and
configurable I/O (Yellow terminals with black text) when configured as safety I/O. Follow
the common specifications for all digital I/O in section 4.3 Safety I/Oabove.
Safety devices and equipment must be installed according to the safety instructions and
the risk assessment in chapterSafety.
All safety I/O are paired (redundant), so a single fault does not cause loss of the safety
function. However, the safety I/Omust be kept as two separate branches.
The permanent safety input types are:
•
Robot Emergency Stop for emergency stop equipment only
•
Safeguard Stop for protective devices
•
3PE Stop for protective devices
UR3e 48 User Manual
4. Electrical Interface
Copyright © 2009–2024 by UniversalRobotsA/S. All rights reserved.