Variable Waypoint
Description A variable waypoint moves to a position determined by a variable in PolyScope.
The variable must be in the pose URScript format, p[x, y, z, rx, ry, rz], allowing a single
waypoint in the Program Tree to be updated by changing the X, Y, Z, RX, RY, or RZ
value without manually resetting the waypoint.
When to use:
•
If combined with scripting elements.
•
When receiving data from external devices for positioning like cameras, etc.
When not to use:
•
When a specific location must be reached repeatably.
•
If you are not using variables or external devices.
•
If a waypoint must be moved manually, or redefined by either jogging or
freedrive.
Add a variable
waypoint
Add a variable waypoint that can be modified during run through of the robot program.
Add a variable
waypoint to a
robot program
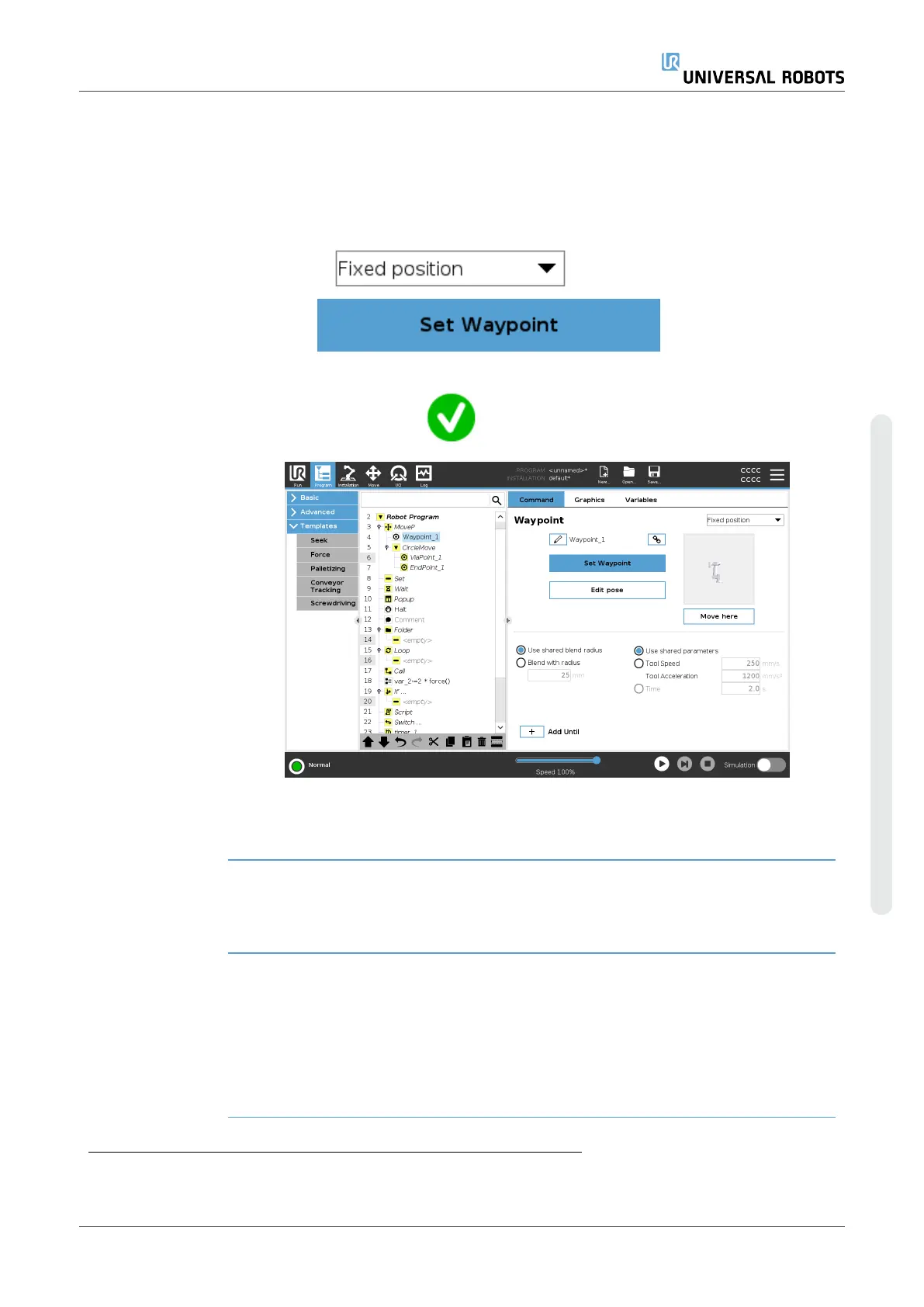
1. In the Program tab, hit the basic menu
2. Add a move command
3. Select the automatically generated waypoint
a. Notice that the selector is automatically set to Fixed position.
b. Change the selector to Variable position.
4. Select the variable from the drop-down menu.
User Manual 205 UR3e
Copyright © 2009–2024 by UniversalRobotsA/S. All rights reserved.