33
5 Run the servo system
This chapter describes the basic function and using method of DS2 series servo.
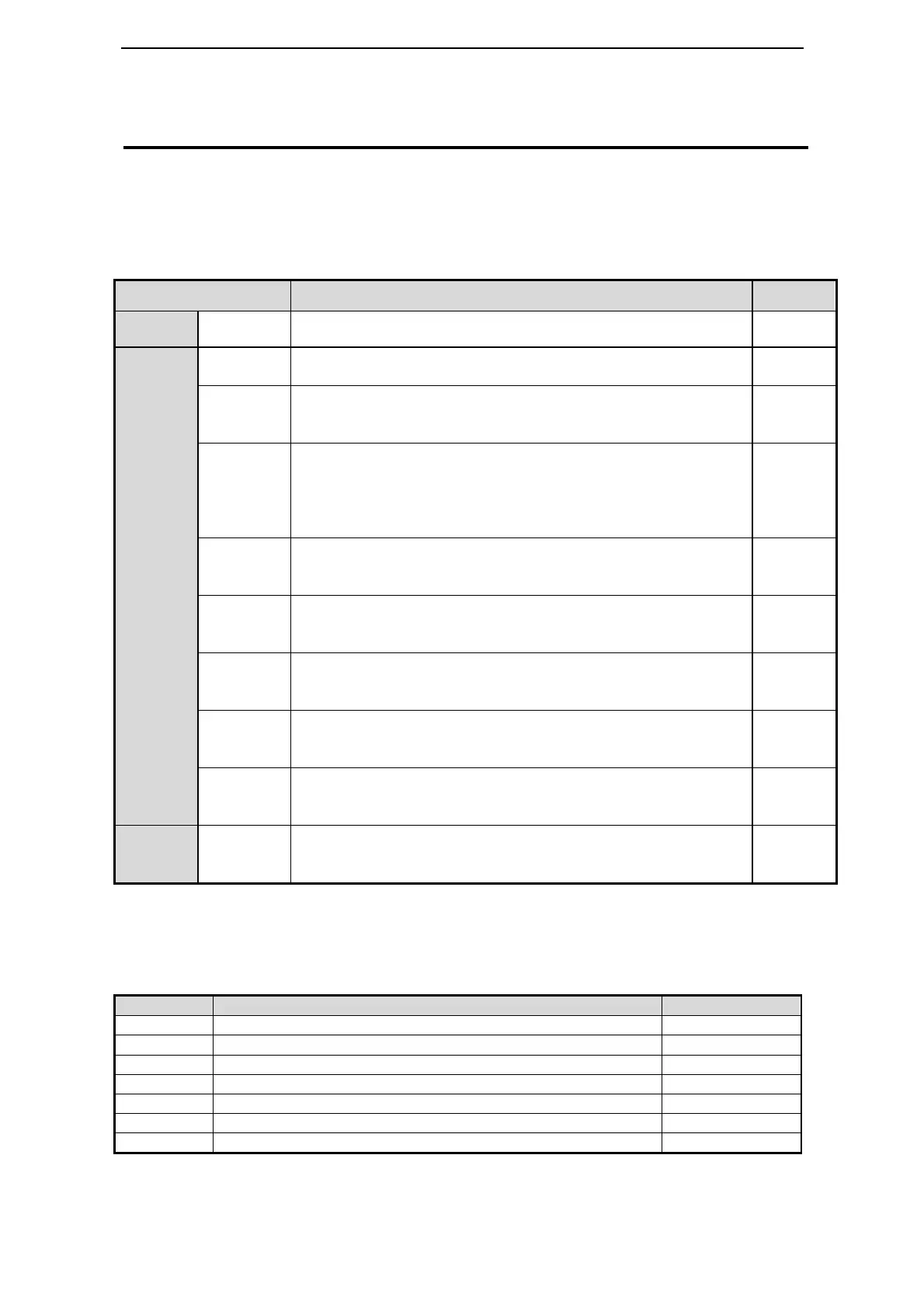
5-1.Control mode selection
DS2 series servo has one main mode and two sub modes. Sub mode 1 and 2 can be
switched to each other via /C-SEL signal.
Parameter Control mode
P0-00 0
Testing mode, users cannot change!
Sub
mode1
The motor will not power on even if the servo drive enables.
Control the output torque of servo motor via operating panel or
communication.
Torque control (analog voltage command)
Control the output torque of servo motor via analog voltage
command. It is mostly used to close-loop torque control with upper
device, such as tension control. (If servo drive doesn’t have analog
input port, it cannot use this mode.)
Speed control (internal speed setting)
Use /SPD-D, /SPD-A, /SPD-B to select the speed which is set in
the servo drive. The servo drive can set 3 speeds.
Speed control (analog voltage command)
Control the speed of servo motor via analog voltage command. It is
mostly used to close-loop speed control with upper device.
Position control (internal position command)
Control the position via internal position command; it can set pulse
quantity and torque.
(default
value)
Position control (external pulse command)
Control the position of servo motor via pulse command. Control the
position via pulse quantity; control the speed via pulse frequency.
Speed control (pulse frequency command)
Control the speed of servo motor via pulse frequency, but not
control the position.
Sub
mode2
sub mode 1
The servo will enter sub mode2 when /C
5-2.Basic function setting
Switch the motor rotate direction
Servo immediately stop torque

 Loading...
Loading...
