66
6 Servo gain adjustment
This chapter will introduce some skills about servo gain adjustment.
6-1.Servo gain setting
6-1-1.Gain setting of speed loop
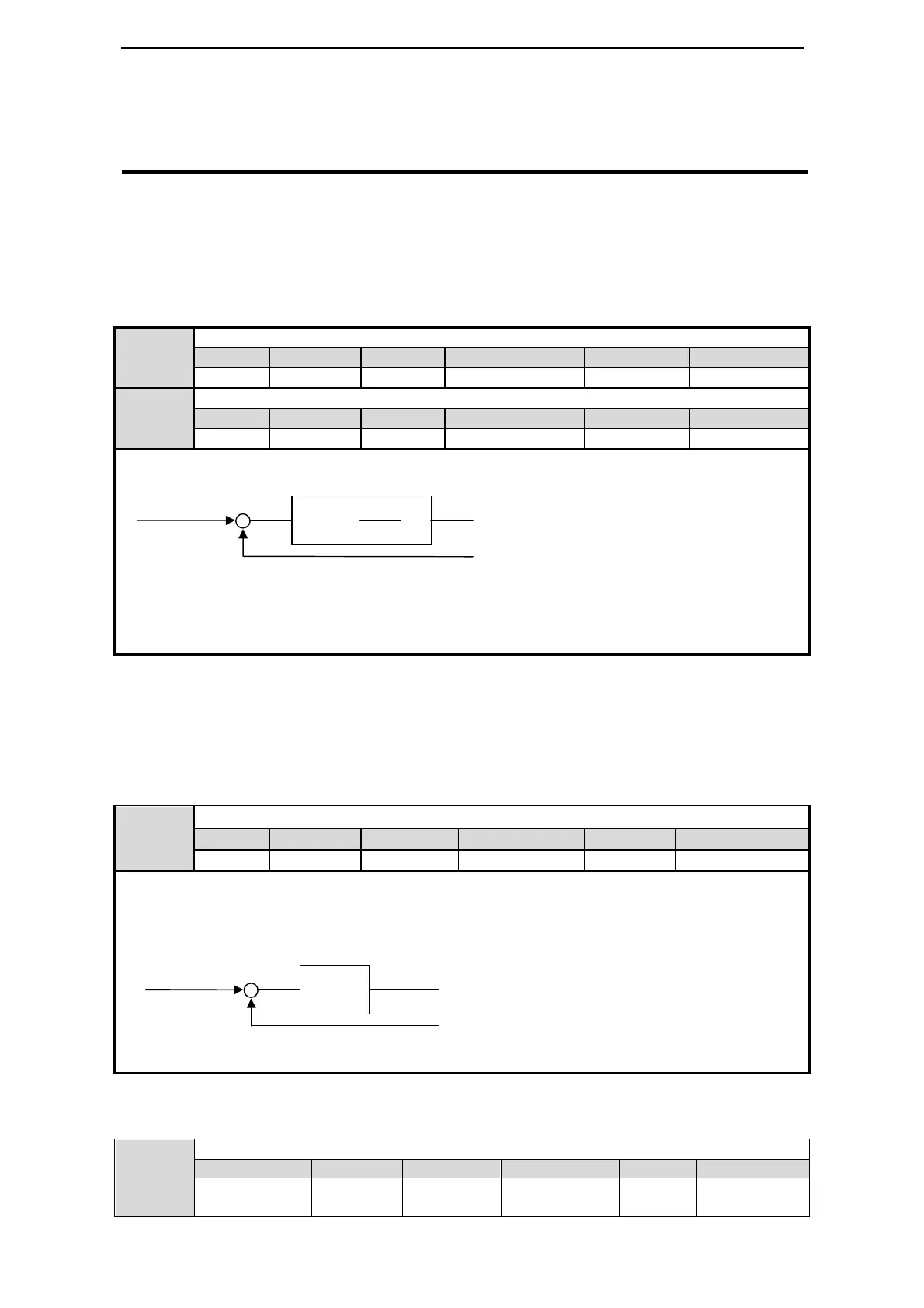
Gain parameters about speed loop:
peed loop integral time constant (Ki)
To set the speed loop gain larger and the speed integral time constant smaller can realize high response
speed controlling. But servo will restrict by machine performance.
6-1-2.Gain setting of position loop
6-1-2-1.Position loop proportion gain
Gain parameter about position loop:
In position control mode, the servo will alarm when the offset pulse over the limit value.
The value is offset pulse limit parameter:
pulse
OFF
Position loop gain(Kp)
To do position control with high response and less offset needs to set the position loop gain larger. But
servo will restrict by machine performance.
+
-
Position feedback
Position loop gain
Kp
Kp(1+ )
1
KiS
+
-
Speed feedback
Speed loop gain

 Loading...
Loading...


