6.4 Supported SynqNet Features
6-11
6
6.4.3 Service Commands
Two types of additional operations are available, Direct Commands and Memory Operations. Different settings
are used to distinguish if a direct command is being issued or not, and to distinguish the type of memory being
accessed. The setting for the read or write functions setting will apply to all Memory Operations as well as some
Direct Commands.
For more information on operating methods, refer to the MEI SynqNet Controller manuals.
(1) Memory Operations
Motor capacity, motor models, encoder resolution, and alarm history data can be read.
(2) Direct Commands
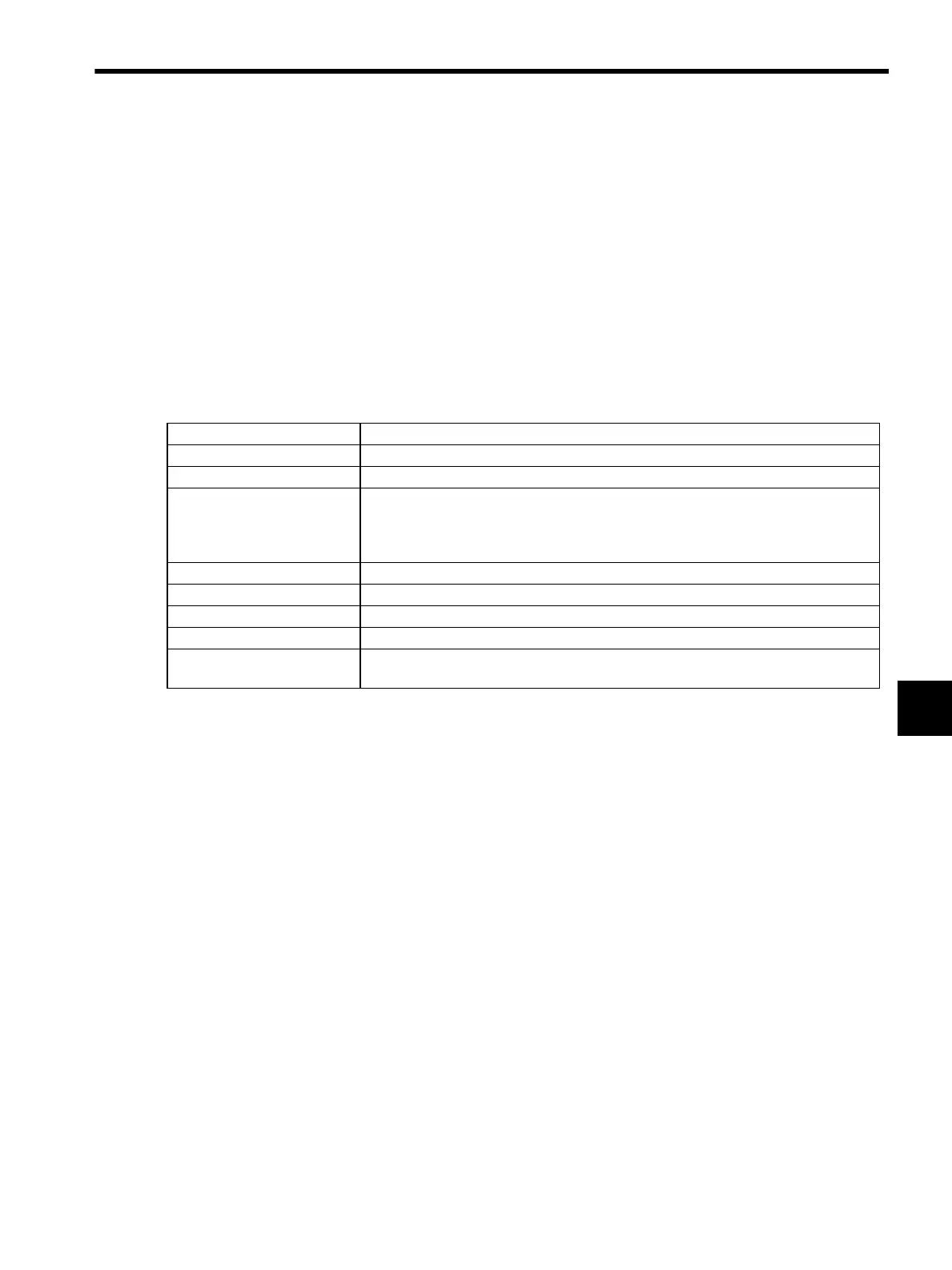
The following direct commands are supported by SGDS SynqNet.
Table 6.4 Supported Direct Commands
Name Meaning
Read Alarm (Read) Reads an alarm code from the alarm history.
Alarm Count (Read) Reads the number of active alarms stored in alarm history buffer.
Clear Alarm (Write) Clears all alarms in the active alarm list that may be cleared. See the Alarms table for a
list of alarms that can be cleared. If all the alarms in the alarm list can be cleared then
the fault line is deasserted, the Fault flag response will be cleared, and the servo will be
enabled if the hardware enable line is asserted and the Amp Enable is set.
Read Warning Returns a warning code from the warning list.
Warning Count (Read) Reads the number of warnings stored in warnings list.
Clear Warning (Write) Clears all warnings.
Multi-turn Count Read Reads the 16-bit multi-turn value.
Multi-turn Count Clear (Write) Resets the serial encoder multi-turn data. Also will clear alarm 0810H, encoder backup
error. Requires a SynqNet reset afterwards.
SIEPS80000025.book 11 ページ 2004年10月25日 月曜日 午前11時57分