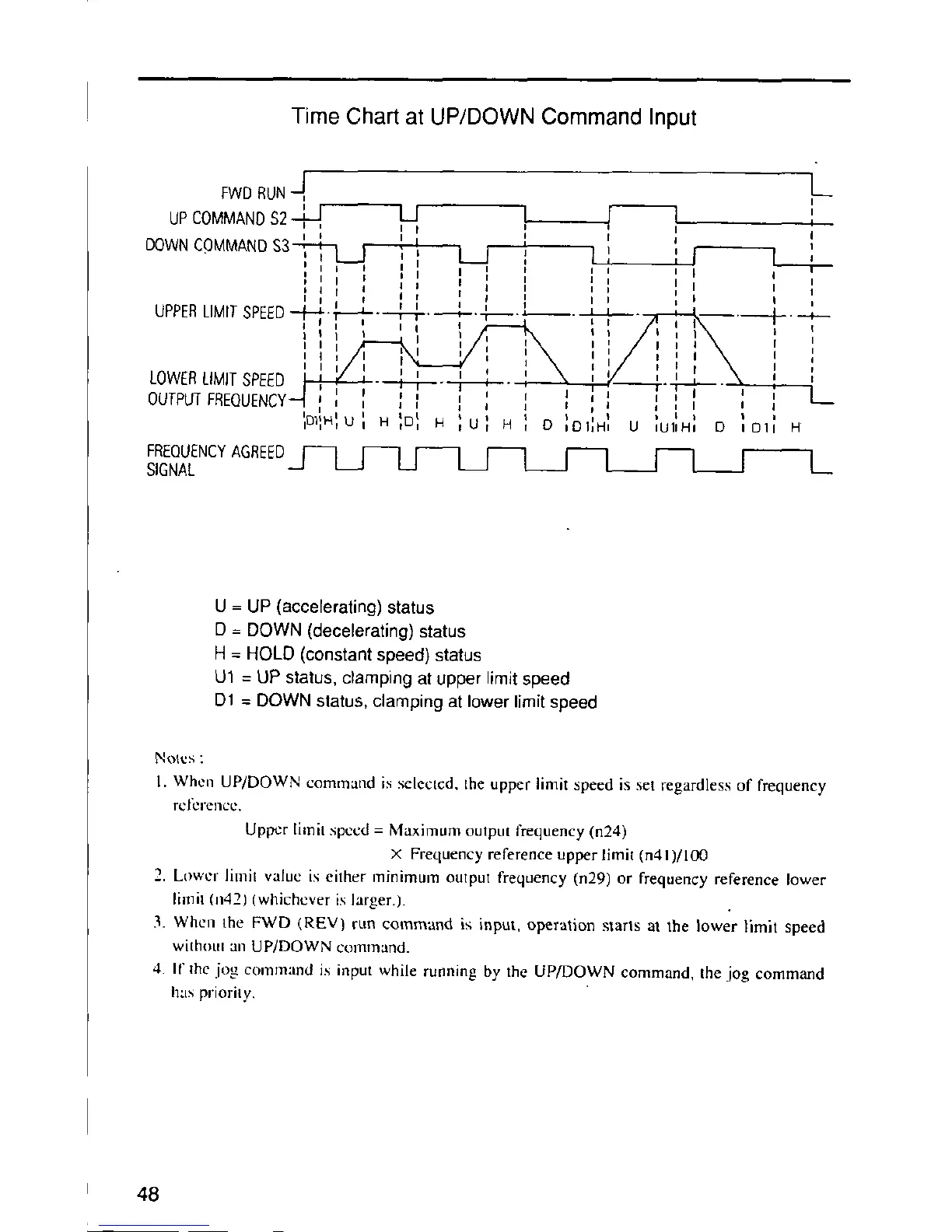
Time Chart at UP/DOWN Command Input
FWDRUN4
UPCOMMAND$2_ _ ',
i t i i i
DOWNCOMMANDSS'_', '_: i ' :
, i i i
, I i i i i i i
i r it i , i i i
UPPERLIMITSPEED,--'HI ,'_ I _I. _._,..I _- -j_--_-Jx-- ._. _
iii ii i i i
i i I i i
', , ' ,, ,, ,
LOWERLIMITSPEED , i , J , L
OUTPUTFREOUENCY--__ I I i I ', , ,
IDIIHIUI H tDi H iUI H r D 101jill U IUIIHI D IDII H
FREQUENCYAGREED_ _ _ [-----L
SIGNAL
U = UP (accelerating) status
D = DOWN (decelerating) status
H = HOLD (constant speed) status
U1 = UP status, clamping at upper limit speed
D1 = DOWN status, clamping at lower limit speed
Nol_s :
I. When UP/DOWN command is selected, lbe upper limit speed is set reg_.rd]ess of Frequency
r_lel'cnce.
Upper limil speed = Maximum output frequency (n24)
× Frequency reference upper limit (n41)/lO0
2. Lower limll value is eilher minimum output frequency (n29) or frequency reference lower
limil (n42) (whichever is larger.).
3. When the FWD (REV) run command is input, operation slarls al the lower limit speed
witht)ul an UP/DOWN command.
4. If lhe jog command is input while running by the UP/DOWN command, the jog command
h_t_, priorily.
48

 Loading...
Loading...







