NoteAction
xx1000001379
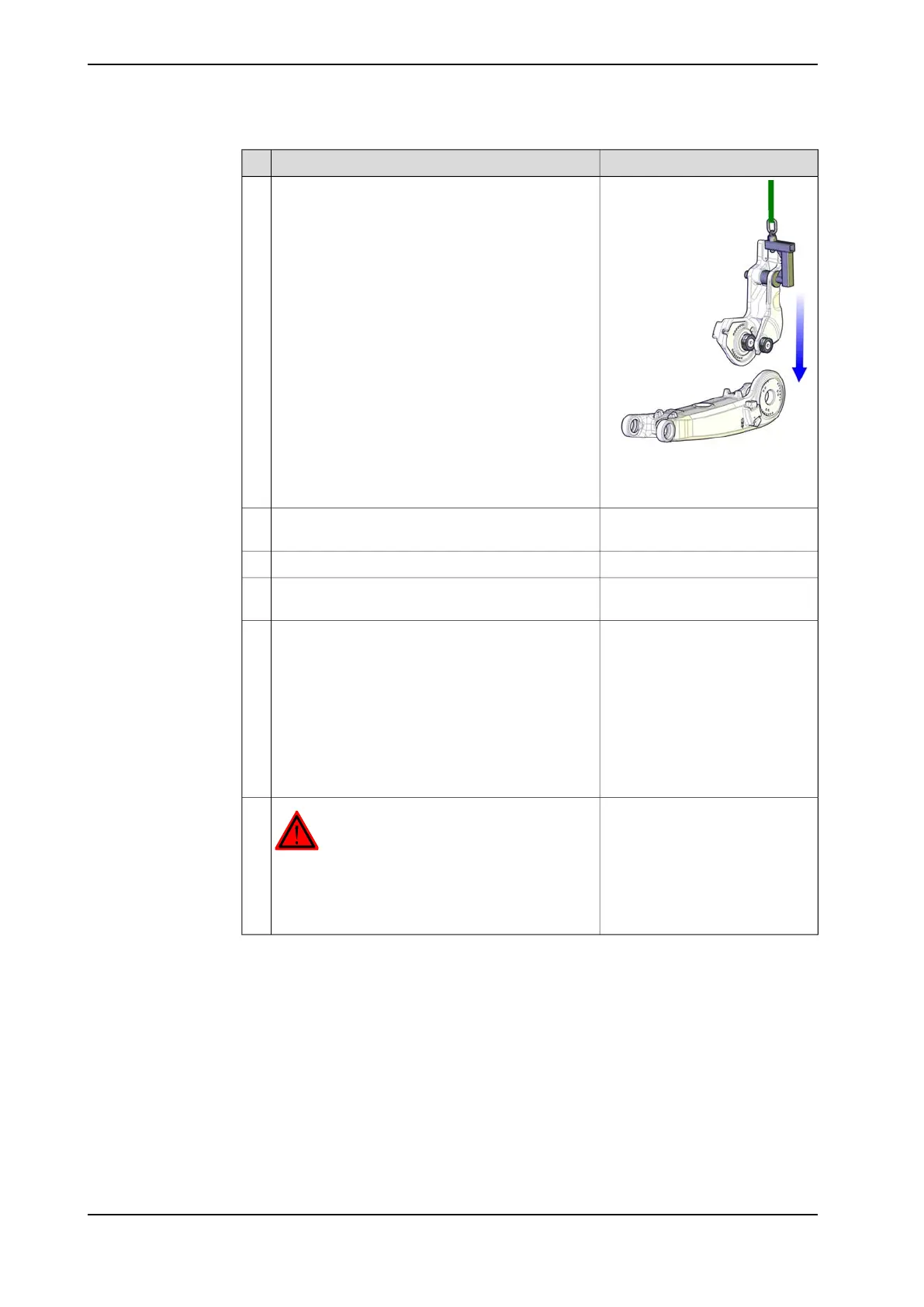
Lift the parallel arm, lower it and put it in mounting
position with the lower arm.
13
Art. no. is specified in Required
equipment on page 252.
Carefully press the parallel arm onto the lower arm
using the pressing tool, lower arm.
14
Fit the big and small VK cover.15
Detailed in section Replacing the
complete lower arm on page 244.
Refit the complete lower arm.16
Pendulum Calibration is described
in Operating manual - Calibration
Pendulum, enclosed with the cal-
ibration tools.
Recalibrate the robot.17
Axis Calibration is described in
Calibrating with Axis Calibration
method on page 352.
General calibration information is
included in section Calibration on
page 341.
DANGER
Make sure all safety requirements are met when
performing the first test run. These are further de-
tailed in the section First test run may cause injury
or damage on page 28.
18
258 Product manual - IRB 6660
3HAC028197-001 Revision: S
© Copyright 2007-2018 ABB. All rights reserved.
4 Repair
4.4.6 Replacement of parallel arm
Continued