6 Programming
6.1. RAPID components
553HAC021272-001 Revision: H
© Copyright 2004-2008 ABB. All rights reserved.
6 Programming
6.1. RAPID components
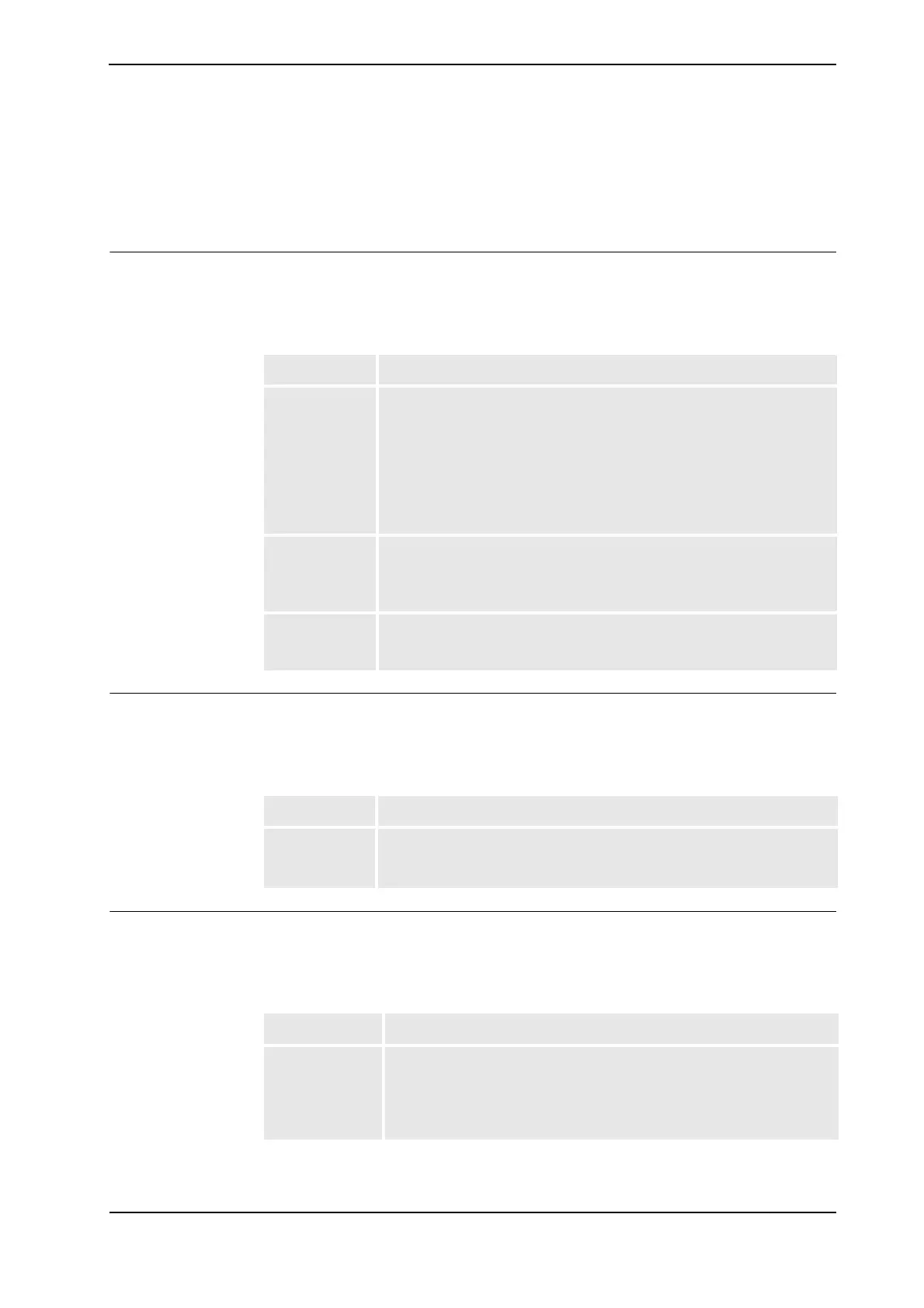
Data types
This is a brief description of each data type in MultiMove. For more information, see the
respective data type in Technical reference manual - RAPID Instructions, Functions and Data
types.
System data
System data is predefined, internal data of the robot. A system data can be read, but not
changed, from a RAPID program. For more information, see Technical reference manual -
RAPID Instructions, Functions and Data types.
Instructions
This is a brief description of each instruction in MultiMove. For more information, see the
respective instruction in Technical reference manual - RAPID Instructions, Functions and
Data types.
Data type Description
syncident A variable of the data type syncident is used to identify which
WaitSyncTask, SyncMoveOn or SyncMoveOff instructions, in the
different task programs, should be synchronized with each other.
The name of the syncident variable must be the same in all task
programs.
Declare syncident variables globally in each task. Do not reuse a
syncident variable (each WaitSyncTask, SyncMoveOn and
SyncMoveOff in a task program should have a unique syncident).
tasks A persistent variable of the data type tasks contains names of the tasks
that will be synchronized with WaitSyncTask or SyncMoveOn.
The tasks variable must be declared as system global (persistent)
variable, with the same name and the same content in all task programs.
identno A numeric value or a variable of type identno is used in the argument ID
of any move instructions executed between the SyncMoveOn and
SyncMoveOff instructions.
System data Description
ROB_ID Reference to the robot (if any) controlled by the task.
If used from a task that does not control a robot, an error will occur. Always
use TaskRunRob() to check this before using ROB_ID.
Instruction Description
WaitSyncTask WaitSyncTask is used to synchronize several task programs at a
special point in the program.
A WaitSyncTask instruction will wait for the other task programs. When
all task programs have reached the WaitSyncTask instruction, they will
continue their execution.
Continues on next page