6 Programming
6.4.2. Example "UnsyncArc" with independent movements
613HAC021272-001 Revision: H
© Copyright 2004-2008 ABB. All rights reserved.
6.4.2. Example "UnsyncArc" with independent movements
Program description
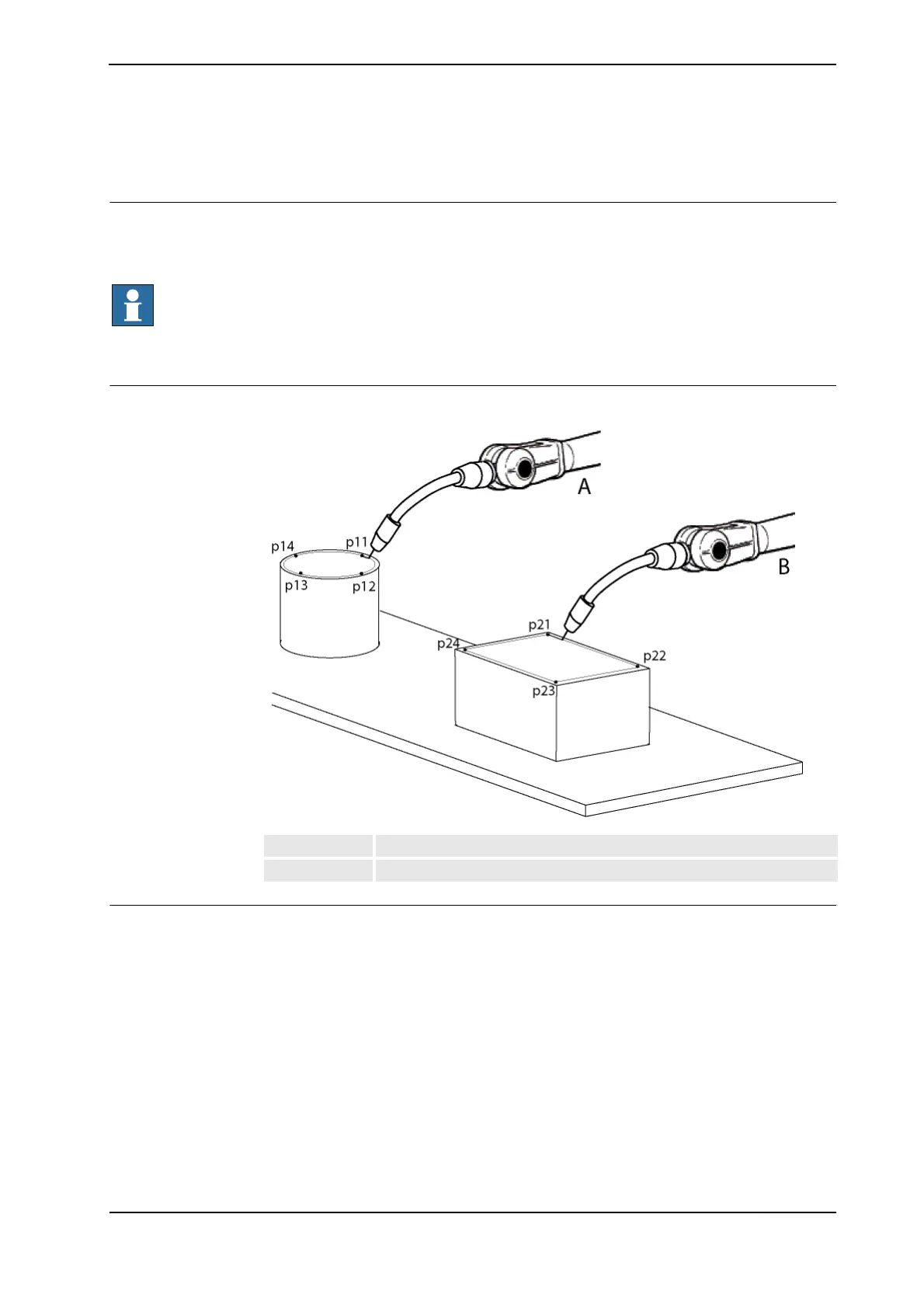
In this example, one robot welds a circle on one object while the other robot welds a square
on another object.
NOTE!
To make the example simple and general, ordinary move instructions (e.g.
MoveL) are used
instead of weld instructions (e.g.
ArcL). For more information about arc welding, see
Application manual - Arc and Arc Sensor.
Illustration
xx0300000603
T_ROB1 task program
MODULE module1
TASK PERS wobjdata wobj1 :=
[ FALSE, TRUE, "",
[ [500, -200, 1000], [1, 0, 0 ,0] ],
[ [100, 200, 100], [1, 0, 0, 0] ] ];
TASK PERS tooldata tool1 := ...
CONST robtarget p11 := ...
...
CONST robtarget p14 := ...
A Robot 1
B Robot 2
Continues on next page