6 Programming
6.5.2. Example "SyncArc" with semi coordinated movements
653HAC021272-001 Revision: H
© Copyright 2004-2008 ABB. All rights reserved.
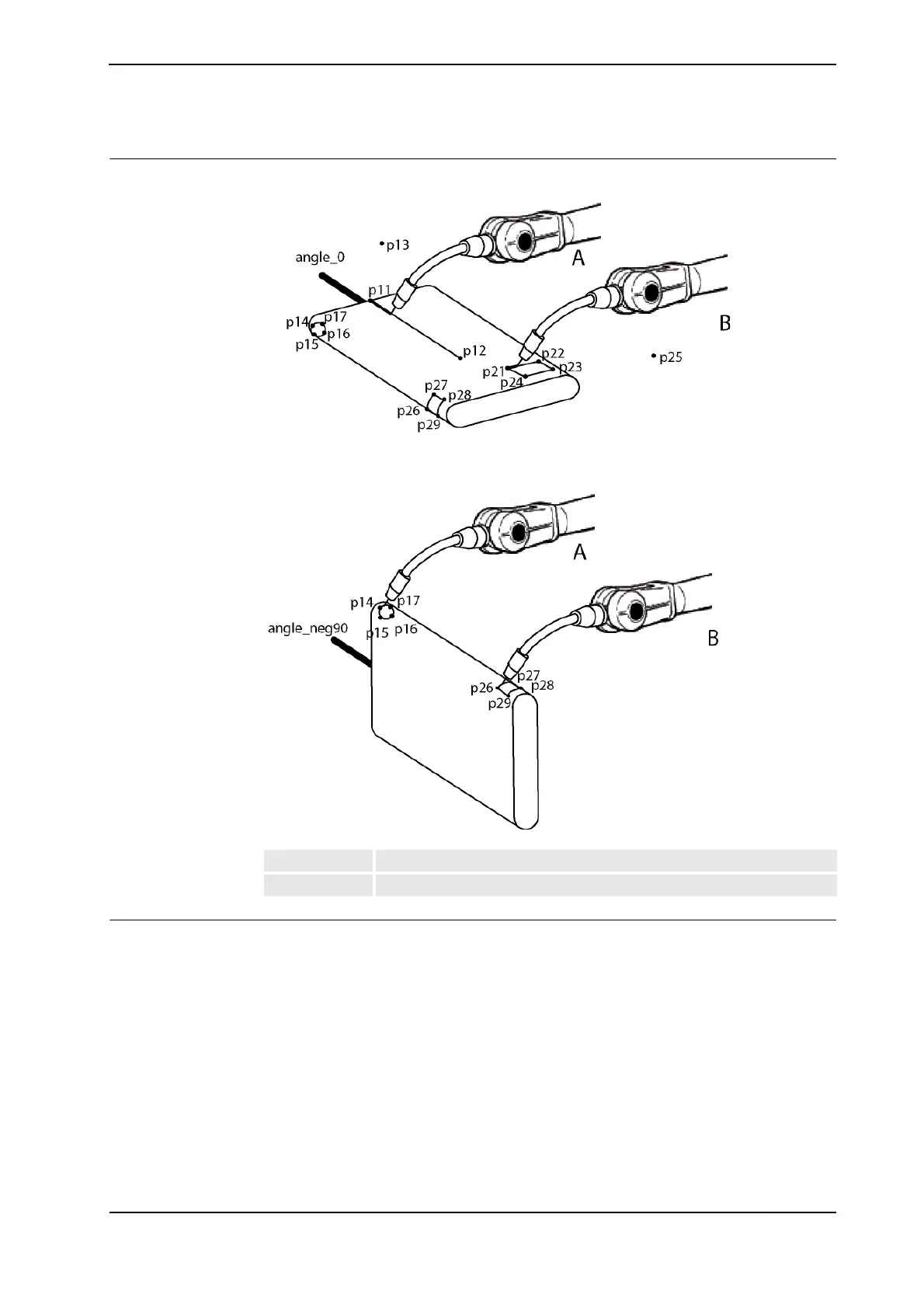
Illustration
xx0300000596
T_ROB1 task program
MODULE module1
VAR syncident sync1;
VAR syncident sync2;
VAR syncident sync3;
PERS tasks all_tasks{3} :=
[["T_ROB1"],["T_ROB2"],["T_STN1"]];
PERS wobjdata wobj_stn1 :=
[ FALSE, FALSE, "STN_1",
[ [0, 0, 0], [1, 0, 0 ,0] ],
[ [0, 0, 250], [1, 0, 0, 0] ] ];
TASK PERS tooldata tool1 := ...
A Robot 1
B Robot 2
Continued
Continues on next page