Multi-Axis Coordinated Motion Instructions
Rockwell Automation Publication MOTION-RM002H-EN-P-February 2018 467
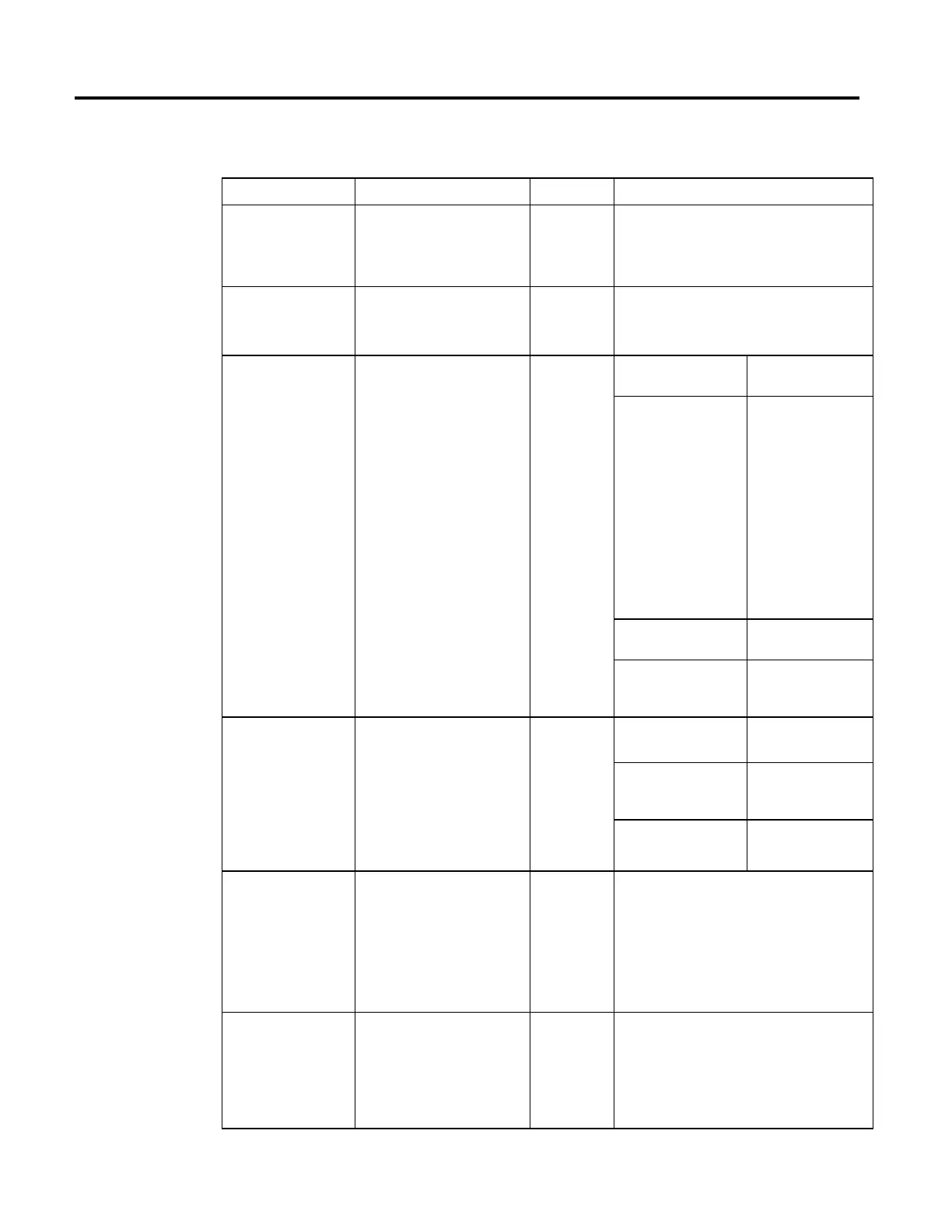
Ladder Diagram and Structured Text
Operand Type Format Description
Coordinate System COORDINATE_SYSTEM Tag Name of the coordinate system.
Motion Control MOTION_INSTRUCTION Tag Control tag for the instruction.
Stop Type
DINT
Immediate
If you want to Choose this Stop Type
Stop all motion for the axes
of the coordinate system
and stop any transform that
the coordinate system is a
part of.
All (0) - For each axis, all
motion generators,
including the coordinated
motion, are taken into
account when computing
the initial dynamics (i.e.,
acceleration rate and
velocity) to be used in the
Decel. Every axis in the
coordinated system is
stopped independently
using the computed initial
dynamics.
Stop only coordinated
moves.
Coordinated Move (2)
Cancel any transform that
the coordinate system is a
part of.
Coordinated Transform (3)
Change Decel(1) DINT Immediate If you want to Then Choose
Use the maximum
deceleration rate of the
coordinate system.
No (0)
Specify the deceleration
rate.
Yes (1)
Decel Rate REAL Immediate or
Tag
Important: An axis could overshoot its target position if
you reduce the deceleration while a move is in process.
Deceleration along the path of the coordinated move. The
instruction uses this value:
• Only if Change Decel is Yes.
• Only for coordinated moves.
Enter a value greater than 0.
Decel Units DINT Immediate 0 = Units per Sec
2
1 = % of Maximum
Only "% of Maximum" is allowed on Cartesian geometries
with coordinate definition = XYZRxRyRz.
% of Cartesian max is used for XYZ and "% of orientation
max" is used for Rx, Ry and Rz.
 Loading...
Loading...


