320 Rockwell Automation Publication MOTION-RM003I-EN-P - February 2018
This attribute is used to set both the Control Mode and Control Method
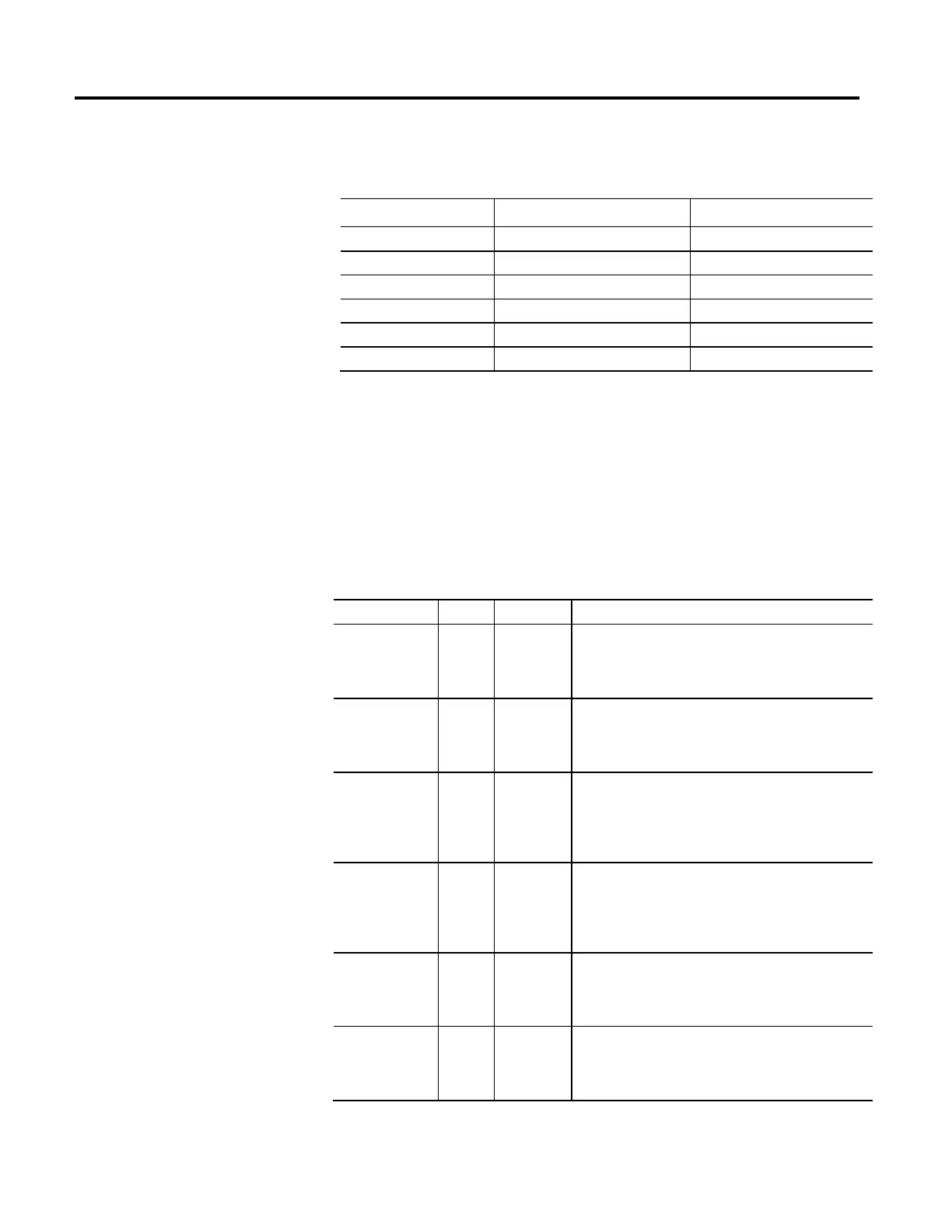
attributes according to the following table:
Axis Config Control Mode Control Method
Converter Only No Control No Control
Feedback Only No Control No Control
Frequency Control Velocity Control Frequency Control
Position Loop Position Control PI Vector Control
Velocity Loop Velocity Control PI Vector Control
Torque Loop Torque Control PI Vector Control
The axis configuration attribute is an enumerated value that determines the
general dynamic control behavior of the motion device axis instance. This
attribute is used by the controller to set the Control Mode attribute that is sent to
the drive as part of the cycle connection, and also determines Control Method
attribute configuration. So, when axis configuration is set by configuration
software, control mode and control method are also updated.
The following table provides descriptions of the Axis configuration attribute
values:
Enumeration Usage Name Description
0 R/N O/C Feedback Only
Provides an axis interface to a specific feedback device as a master
feedback source. The Control Mode and Control Method are set to
No Control in this configuration, indicating that there is no dynamic
control capability associated with this axis.
1 R/F
Frequency
Control
Selects the Frequency Control Method that applies voltage to the
motor, generally in proportion to the commanded frequency or
speed. Accordingly, the Control Mode attribute is set to Velocity
Control.
2 R/P Position Loop
Selects the PI Vector Control Method that applies feedback to
provide closed loop cascaded PI control of motor position, velocity,
and torque, and includes closed loop control of Iq and Id
components of the motor current vector. Accordingly, the Control
Mode attribute is set to Position Control.
3 R/V O/P Velocity Loop
Selects the PI Vector Control Method that applies feedback to
provide closed loop cascaded PI control of motor velocity, and
torque, and includes closed loop control of Iq and Id components of
the motor current vector. Accordingly, the Control Mode attribute is
set to Velocity Control.
4 R/T O/PV Torque Loop
Selects the PI Vector Control Method that applies feedback to
provide closed loop PI control of motor torque through control of Iq
and Id components of the motor current vector. Accordingly, the
Control Mode attribute is set to Torque Control.
5 R/B O/D Converter Only
Provides an axis interface to a standalone power converter device.
Both the Control Mode and Control Method are set to No Control in
this configuration, indicating that there is no dynamic control
capability associated with this axis.

 Loading...
Loading...



