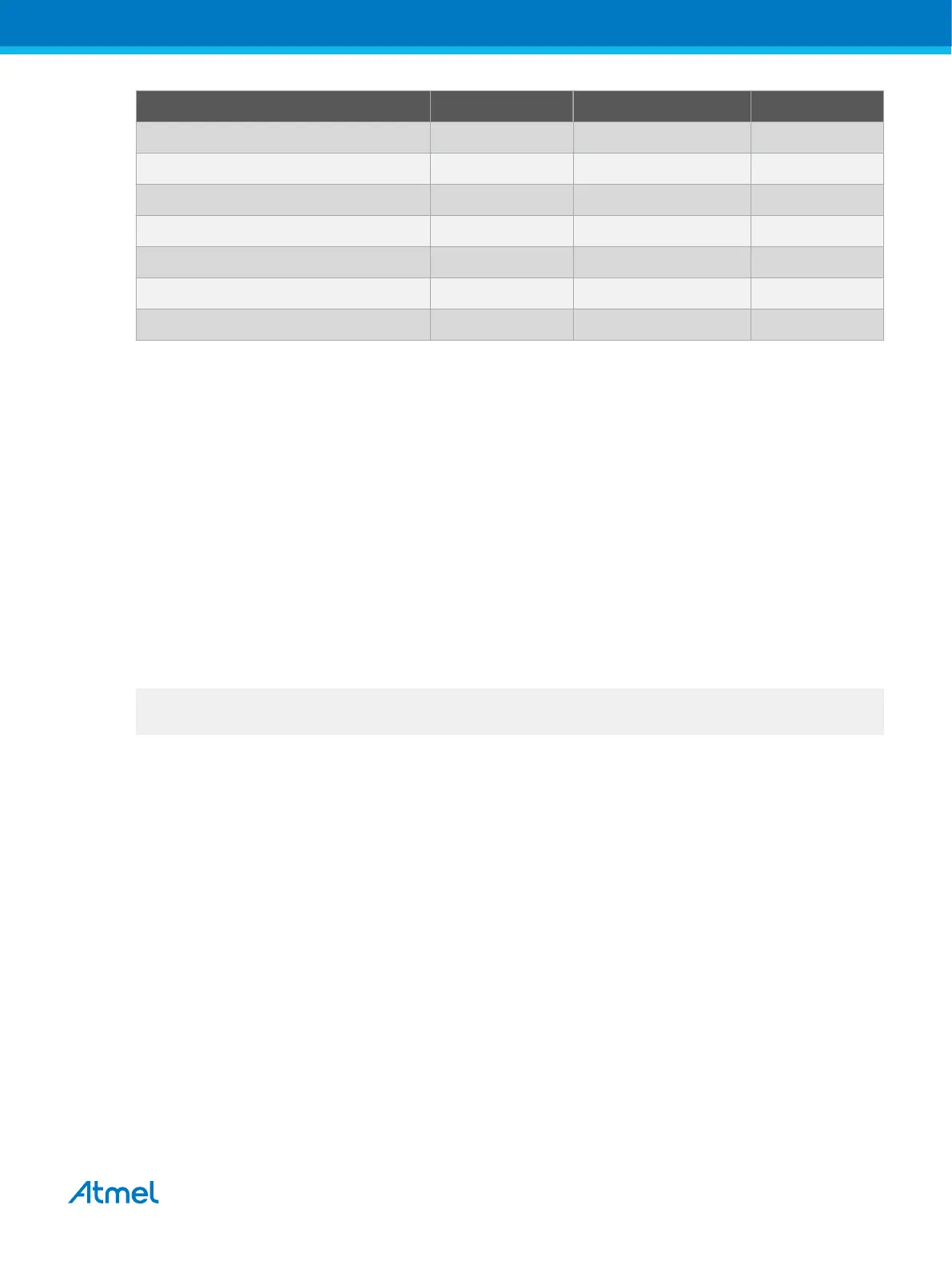
Atmel-ICE AVR port pins Target pins Mini-squid pin TPI pinout
Pin 4 (VTG) VTG 4 2
Pin 5 (TMS) 5
Pin 6 (nSRST) /RESET 6 5
Pin 7 (not connected) 7
Pin 8 (nTRST) 8
Pin 9 (TDI) 9
Pin 10 (GND) 0
4.4.11. Advanced Debugging (AVR JTAG /debugWIRE devices)
I/O Peripherals
Most I/O peripherals will continue to run even though the program execution is stopped by a breakpoint.
Example: If a breakpoint is reached during a UART transmission, the transmission will be completed and
corresponding bits set. The TXC (transmit complete) flag will be set and be available on the next single
step of the code even though it normally would happen later in an actual device.
All I/O modules will continue to run in stopped mode with the following two exceptions:
• Timer/Counters (configurable using the software front-end)
• Watchdog Timer (always stopped to prevent resets during debugging)
Single Stepping I/O access
Since the I/O continues to run in stopped mode, care should be taken to avoid certain timing issues. For
example, the code:
OUT PORTB, 0xAA
IN TEMP, PINB
When running this code normally, the TEMP register would not read back 0xAA because the data would
not yet have been latched physically to the pin by the time it is sampled by the IN operation. A NOP
instruction must be placed between the OUT and the IN instruction to ensure that the correct value is
present in the PIN register.
However, when single stepping this function through the OCD, this code will always give 0xAA in the PIN
register since the I/O is running at full speed even when the core is stopped during the single stepping.
Single stepping and timing
Certain registers need to be read or written within a given number of cycles after enabling a control
signal. Since the I/O clock and peripherals continue to run at full speed in stopped mode, single stepping
through such code will not meet the timing requirements. Between two single steps, the I/O clock may
have run millions of cycles. To successfully read or write registers with such timing requirements, the
whole read or write sequence should be performed as an atomic operation running the device at full
speed. This can be done by using a macro or a function call to execute the code, or use the run-to-cursor
function in the debugging environment.
Atmel Atmel-ICE [USER GUIDE]
Atmel-42330C-Atmel-ICE_User Guide-10/2016
43

 Loading...
Loading...