www.balluff.com 9español
4
Descripción de producto (continuación)
4.2 Funcionamiento
Para realizar la determinación de la posición de un
componente de la instalación, se conecta un sensor de
posición con este componente. Juntos se mueven a lo
largo de un guiaondas que se encuentra dentro del BTL.
Un impulso INIT generado internamente, en combinación
con el campo magnético del sensor de posición, activa
una onda de torsión en el guíaondas que se produce
mediante magnetostricción y se propaga a velocidad
ultrasónica. La onda de torsión que se propaga hacia el
extremo del guíaondas se absorbe en la zona de
amortiguación. La onda de torsión que se propaga hacia el
inicio del guiaondas genera una señal eléctrica en una
bobina captadora. En base al tiempo de propagación de la
onda se determina la posición del sensor de posición y,
por tanto, al mismo tiempo la del componente de la
instalación.
El valor de medición se emite como valor de 32bits con
signo en relación con el punto cero.
Número de sensores de posición
El funcionamiento es posible con uno o dos sensores de
posición, siendo posible ajustar el número fijo a un sensor
de posición o manejarlo de forma flexible.
4.3 Elementos indicadores
Señal Significado
Parpadeando en
rojo 1Hz
Esta señal se produce cuando
aparece en error de medición. El
valor de medición es desconocido
debido a un error o se encuentra
fuera del rango de medición.
Rojo estático Error general.
Verde alternando
con LED
apagado en
relación 10:1,
período de 1s
La comunicación IO-Link está activa.
El dispositivo está preparado.
Verde estático El dispositivo está preparado.
Tab. 4-1: Indicador LED
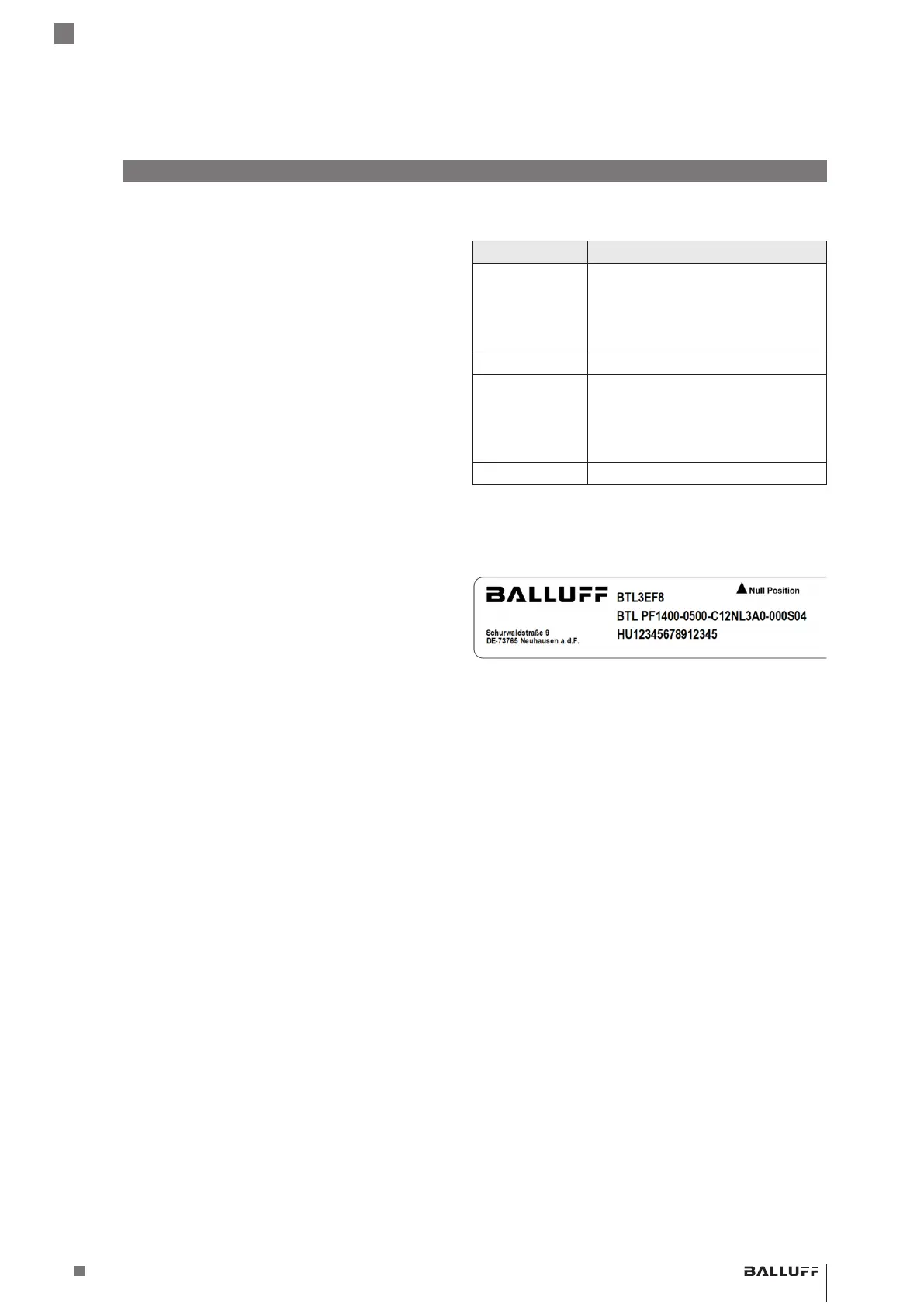
4.4 Placa de características
1)
2)
3)
1)
Código de pedido
2)
Tipo
3)
Número de serie
Fig. 4-2: Placa de características (extracto, ejemplo)
BTL PF _ 400- _ _ _ _ -C12NL _ _ -0-000S04
Sistema magnetostrictivo de medición de posición – Forma constructiva de perfil
 Loading...
Loading...