VFD500 high performance vector control frequency inverter user manual Chapter 5 function code table
PID parameter
switchover
condition
0:no switchover
Do not switch, use KP1, TI1, TD1#
1:switchover via DI
Switch by DI terminal
KP1, TI1, TD1 are used when DI terminal
No. 41 function is invalid; KP2, TI2, TD2 are
used when valid#
2:automatic switchover based on deviation
The absolute value of PID command and
feedback deviation is less than P40.24,
using KP1, TI1, TD1; the absolute value of
deviation is greater than P40.25, using KP2,
TI2, TD2 parameters; the absolute value of
deviation is between P40.24~P40.25, The
two sets of parameters are linearly
transitioned.
PID parameter
switchover
devation 1
PID parameter
switchover
devation 2
PID integral
separation
threshold
PID intial value
holding time
In some applications, one group PID parameter is not enough, different PID parameters would be adopted
according to the situation.
The function codes are used to switch two groups PID parameter. The setting mode of the regulator
parameters P40.20~P40.22 is similar as P40.17~P40.19’s.
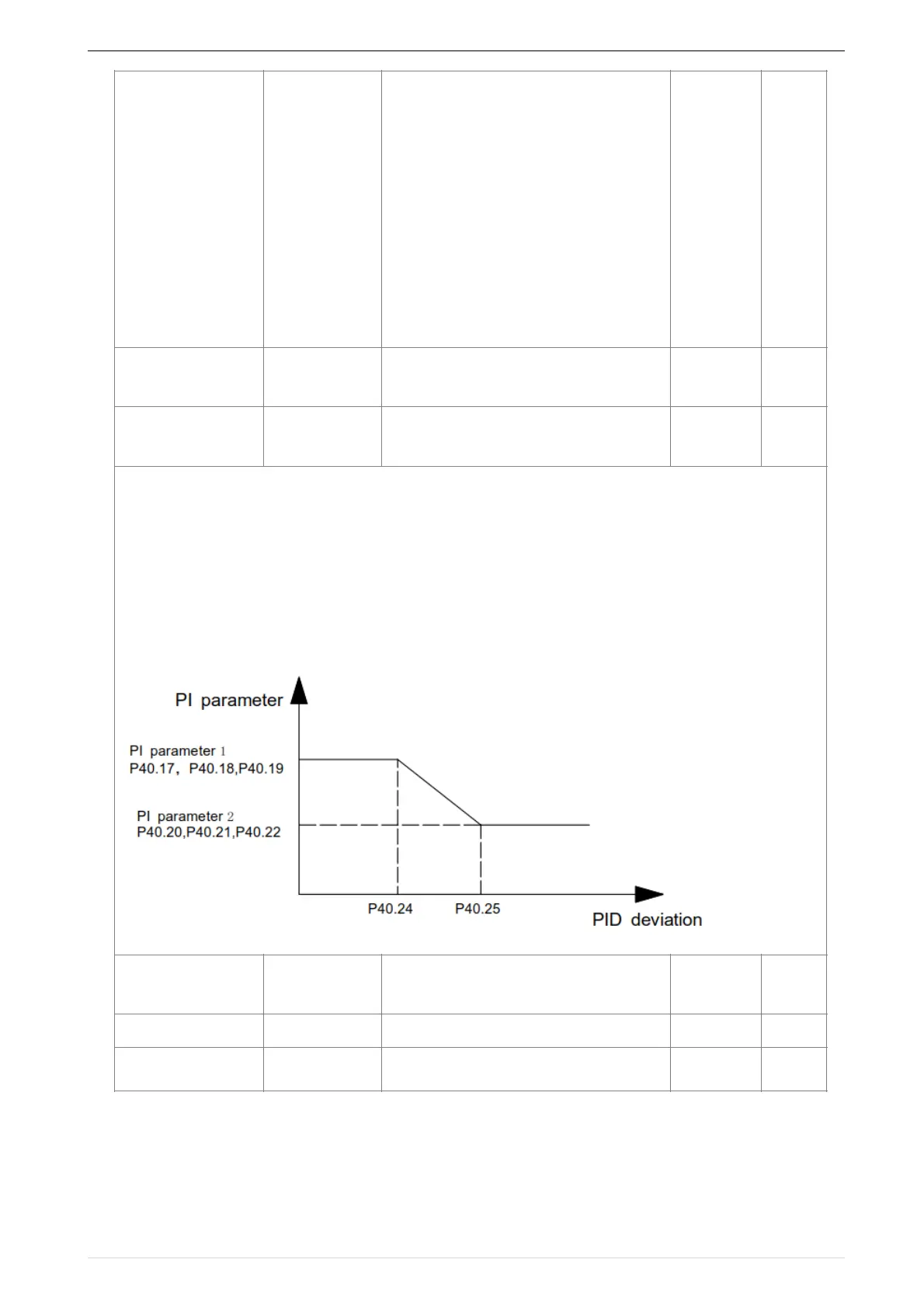
Two groups PID parameter can be switched via DI terminal, or switched according to PID deviation
automatically.
When selection is automatic switching: when the deviation absolute value between given and feedback is
smaller than P40.24 (PID parameter switching deviation 1), PID parameter selection is group 1. When the
deviation absolute value between given and feedback is bigger than P40.25 (PID parameter switching
deviation 2), PID parameter selection is group 2. When the deviation absolute value between given and
feedback is between P40.24 and P40.25, PID parameter is the linear interpolation of two groups PID
parameter, showed as below
!
parameter switching diagram
 Loading...
Loading...

