VLT
®
5000 FLUX
Programming
Description of choice:
NB!:
If the motor is running below 10 Hz for a
longer period than one minute, parameter
236 must be reduced accordingly to
avoid that the motor burns out.
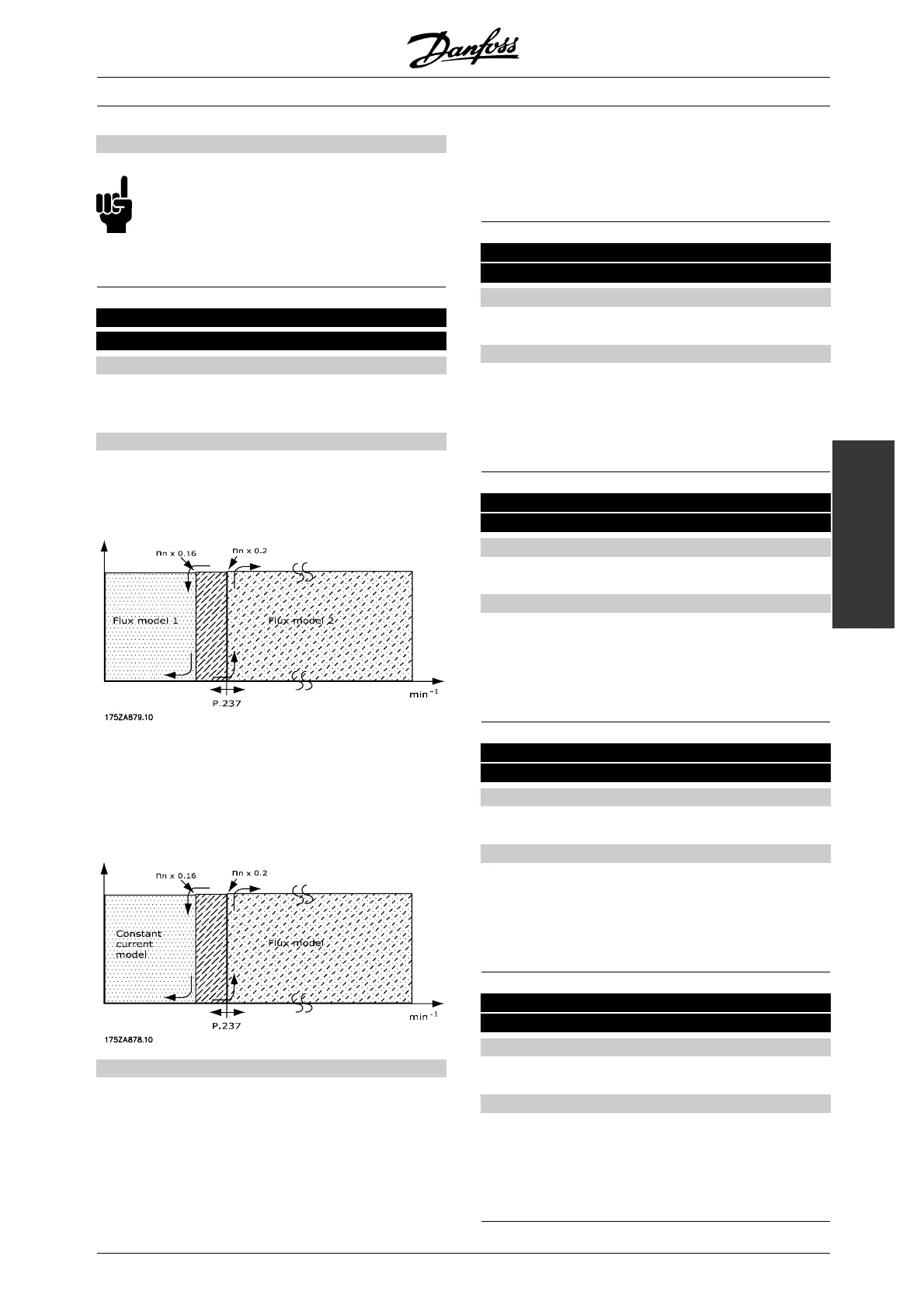
237 Model Shift Speed
(MODEL SHIFT SPEED)
Value:
2 Hz .. 80% of n
norm
✭ 10 Hz (default and n
norm
dependent)
Function:
With this parameter it is possible to make an
adjustment of the shifting point where VLT 5000 FLUX
changes the FLUX model in the DSP.
Parameter 100 TORQUE CONTROL SPEED [5] mode:
Parameter 100 OPEN LOOP [0] mode:
In open loop, the speed must be determined
from the current measurement. Below n
norm
x
0.2, the drive is working from a constant current
model. Above n
norm
x 0.2 the drive is working
from the FLUX model in the drive.
Description of choice:
Constant Torque mode: To optimize the torque control
it may be necessary to run on one FLUX model only
to avoid any bump during the change of FLUX model.
MaxspeedforFLUXmodel1isn
norm
- 10%.
Open Loop mode: To optimize the switching
point from constant current set in parameter
236 and FLUX model 2.
240 Acceleration Jerk 1
(JERK ACCEL. 1)
Value:
0-100%
✭ 33%
Function:
If Jerk Control is selected as ramp-type in
Parameter 206, this Parameter defines the
percentage of the ramp-time used to control the
jerk of the initial acceleration.
241 Acceleration Jerk 2
(JERK ACCEL 2)
Value:
0-100%
✭ 33%
Function:
If Jerk Control is selected as ramp-type in
Parameter 206, this Parameter defines the
percentage of the ramp-time used to control the
jerk of the ending acceleration.
242 Deceleration Jerk 1
(JERK DECCL. 2)
Value:
0-100%
✭ 33%
Function:
If Jerk Control is selected as ramp-type in
Parameter 206, this Parameter defines the
percentage of the ramp-time used to control the
jerk of the initial deceleration.
243 Deceleration Jerk 2
(JERK DECCL. 2)
Value:
0-100%
✭ 33%
Function:
If Jerk Control is selected as ramp-type in
Parameter 206, this Parameter defines the
percentage of the ramp-time used to control the
jerk of teh ending deceleration.
✭ = factory setting. () = display text [] = value for use in communication via serial communication port
MG.55.A6.02 - VLT is a registered Danfoss trademark
87

 Loading...
Loading...