Chapter 7 Servo Parameters|ASDA-B Series
7-54 Revision January, 2009
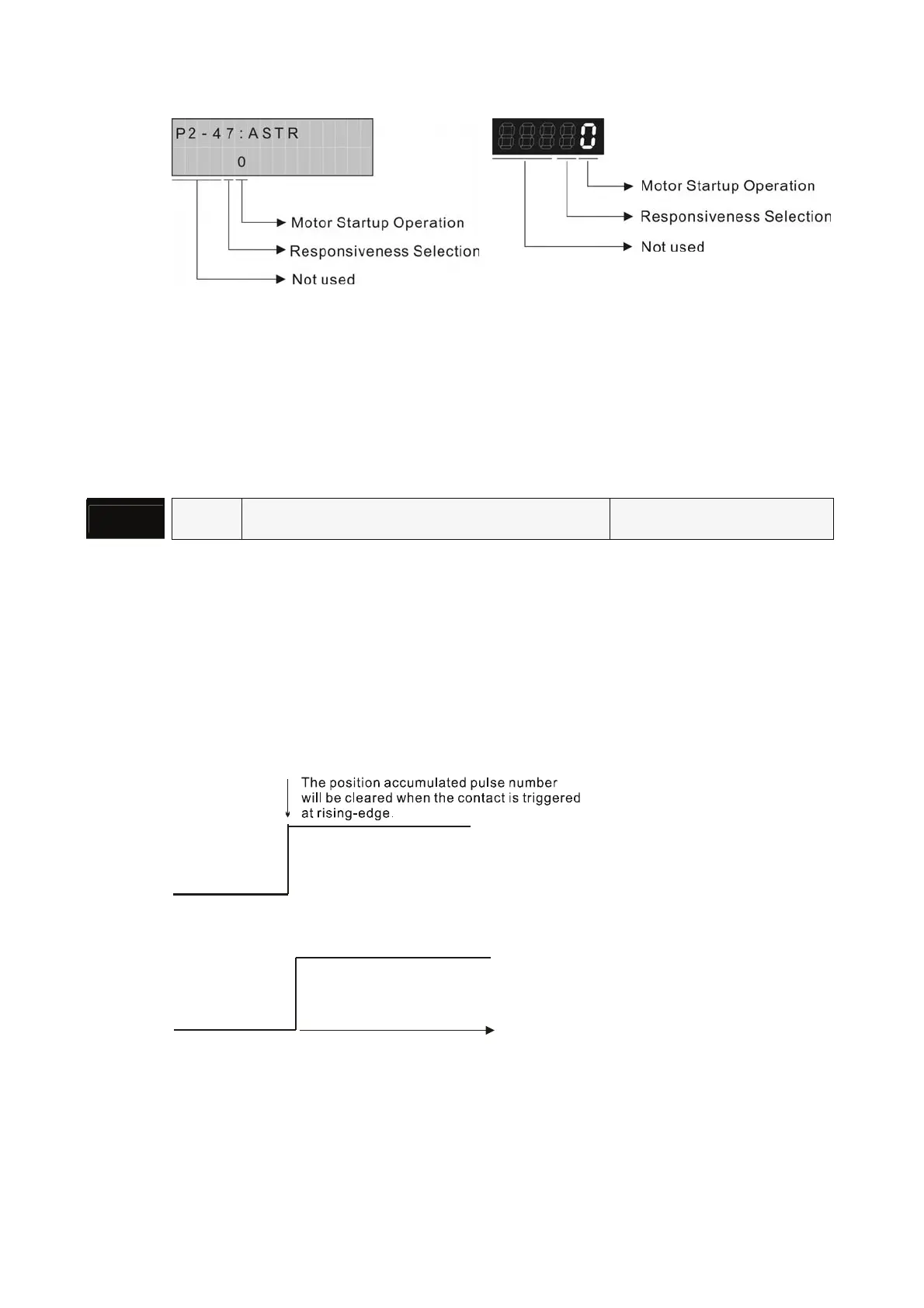
ASD-PU-01A ASD-PU-01B
• Motor Startup Operation Settings:
0: No operation. The motor does not run.
1: Motor startup operation. The motor starts to run.
• Responsiveness Selection Settings:
0: Auto-select the appropriate responsiveness according to the measured load inertia value
1: Select the responsiveness set by parameter P2-31
P2 - 48
CCLR Pulse Deviation Clear Mode Communication Addr.: 0230H
Default: 0 Related Section:
Applicable Control Mode: P DI CCLR(04) in Table 7.A
Unit: N/A
Range: 0 ~ 1
Settings:
When the servo drive is set to CCLR mode, the pulse deviation clear function is enabled.
0: When the input terminal is rising-edge triggered, the position accumulated pulse number will
be cleared.
CCLR
1: After CCLR is activated (ON), the position accumulated pulse number will be cleared
continuously.
The position accumulated pulse number
will be cleared continuously after CCLR
is activated (ON).
CCLR