Chapter 6 Applied Instructions
6-189
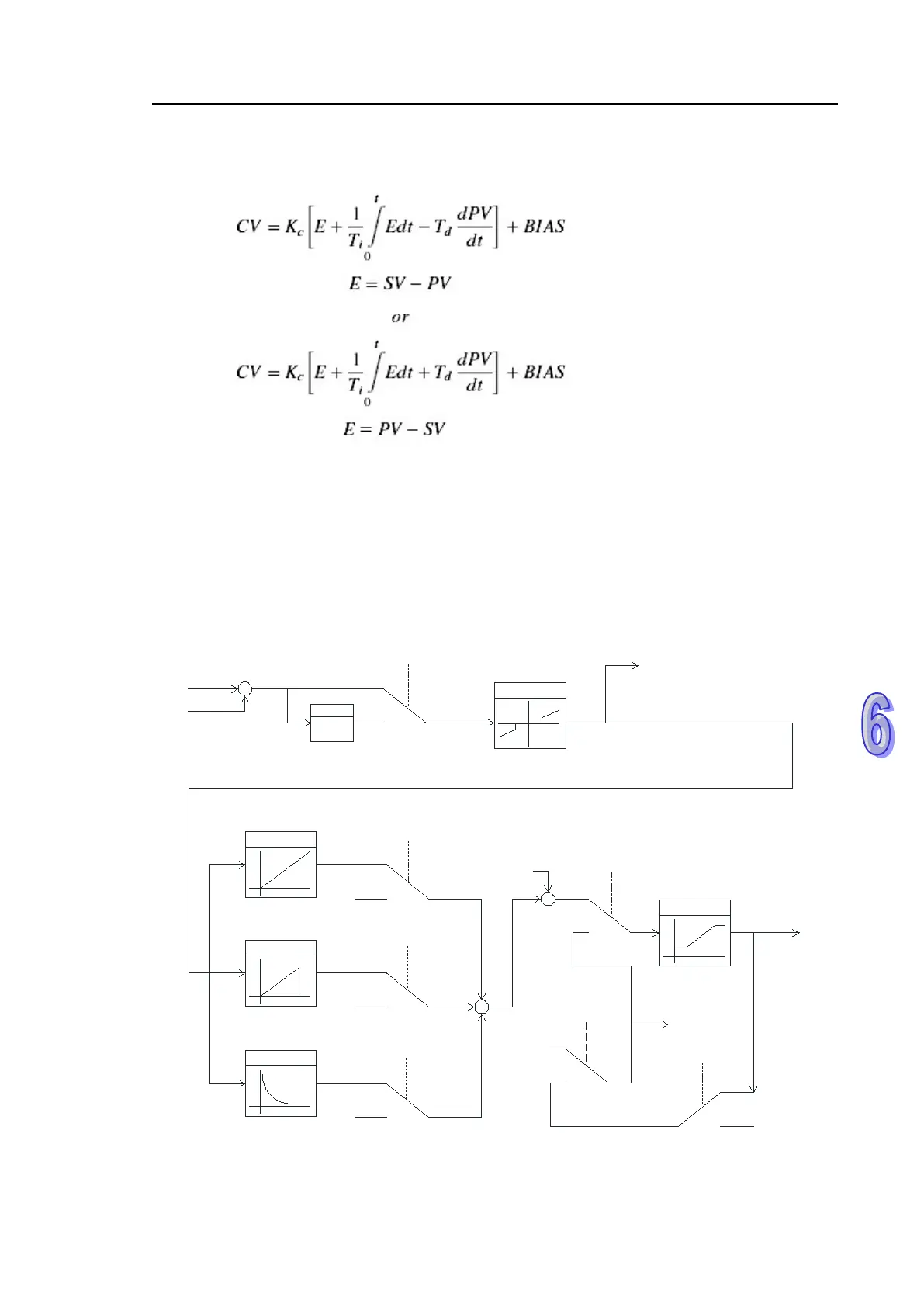
Dependent Formula & Derivative of PV(PID_EQ=True & PID_DE=True)
※The CV values in the formulas above are the MV used in DPIDE.
2. When PID_MODE is set to 1, the PID control mode is the automatic tuning mode. After the
tuning of the parameter is complete, PID_MODE is set to 0. The PID control mode becomes the
automatic control mode.
PID control diagrams:
PID Block Diagram (Independent)
SV
PV
+
-
+
REVERSE
X(-1)
PID_DIR
E
DEAD BAND
ERR_DBW
0
1
PID-P
Kc_Kp
Kc_Kp
>0
<=0
0
PID-I
Ti_Ki
Ti_Ki
>0
<=0
0
0
>0
<=0
PID-D
Td_Kd, Tf
Td_Kd
BIAS
PID_MAN
0
1
0
1
MOUT
MOUT_AUTO
MOUT
PID_MAN
0
1
MOUT
MV
MV_LIMIT
MV_MAX, MV_MIN
+
+
+
+
+
+
+

 Loading...
Loading...



