Dobot Nova Series User Guide
Issue V1.3 (2023-07-19) User Guide Copyright © Yuejiang Technology Co., Ltd.
14
degrees. This posture is called the home posture. The home-point stickers as shown in Figure 4.4
are attached to each joint of the robot arm. When the joint is 0 degree, the stickers on both sides of
the joint will be aligned.
Figure 4.4 Home point sticker
If the home point of the robot arm changes due to the replacement of the transmission parts or
the collision, you can move the robot arm to a state where all the home-point stickers of each joint
are aligned, and then calibrate the home-point through the control software.
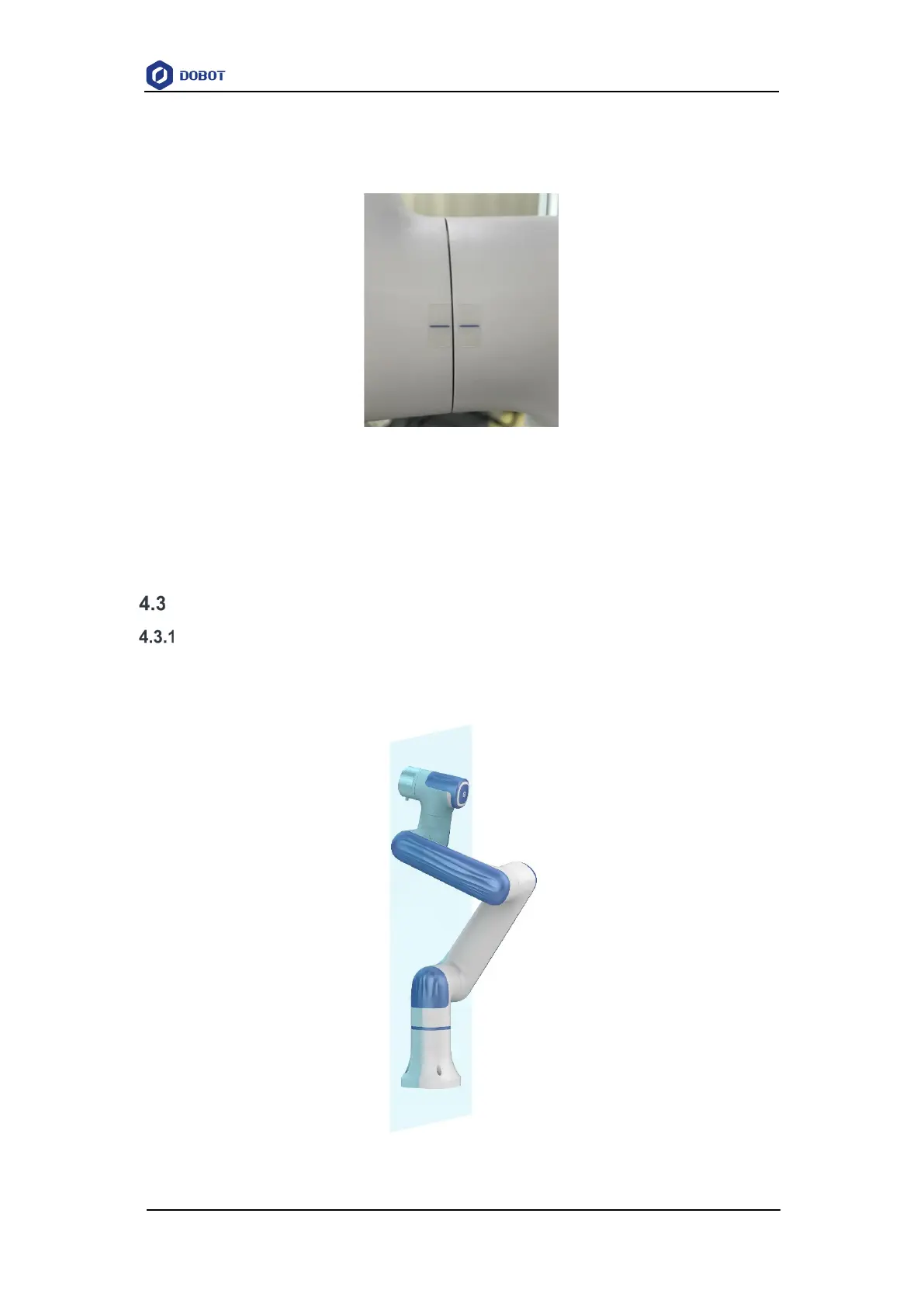
Singularity Point
Shoulder singularity
When the intersection of the J5 axis and the J6 axis of the robot arm is located in the plane
formed by the J1 axis and the J2 axis, it will lead to singularity, as shown in Figure 4.5.
Figure 4.5 Shoulder singularity