Dobot Nova Series User Guide
Issue V1.3 (2023-07-19) User Guide Copyright © Yuejiang Technology Co., Ltd.
33
Robot installation
Robot arm installation
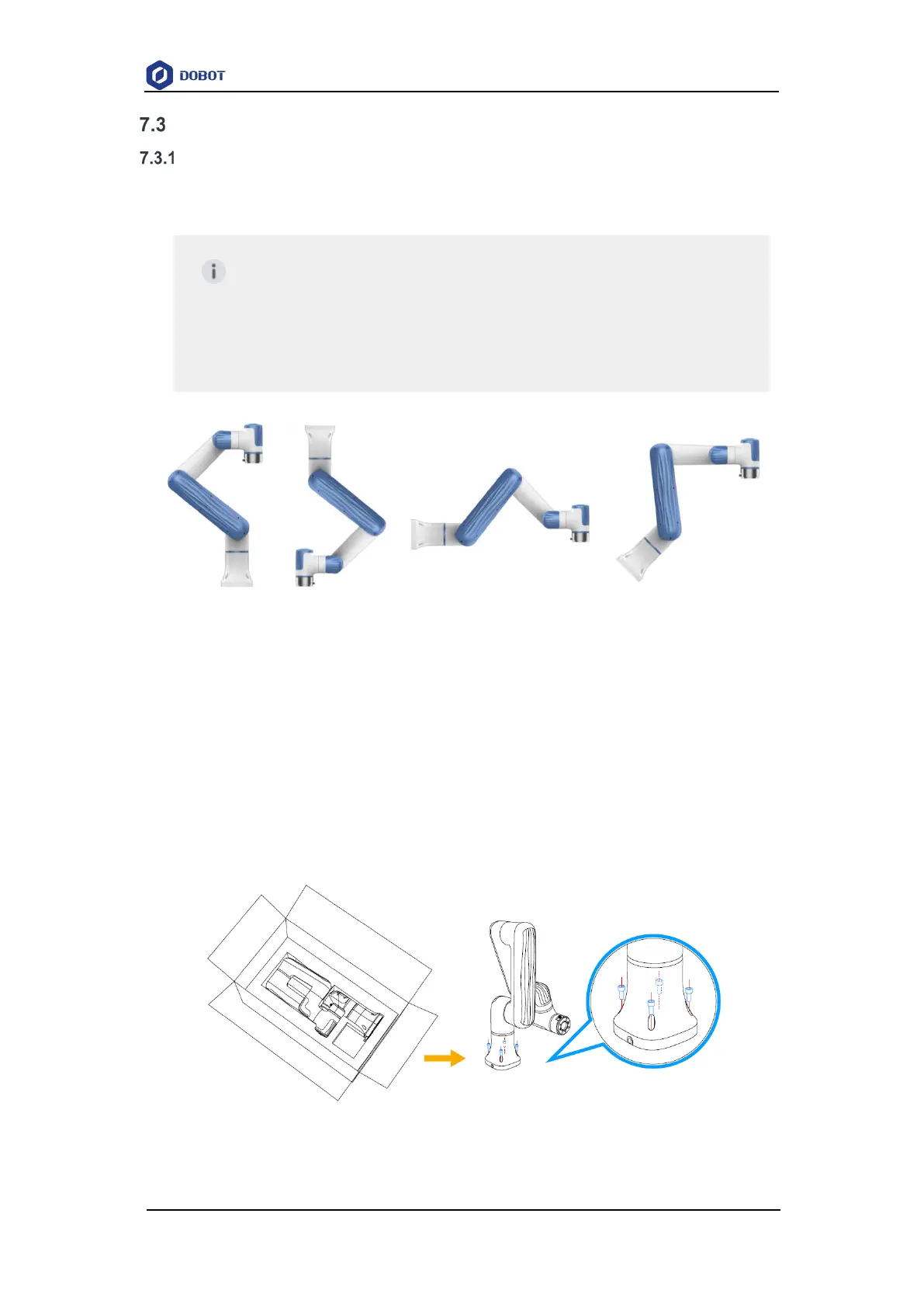
Nova robotic arm supports 360° installation at any angle. Figure 7.1 shows several typical
installation postures.
Figure 7.1 Nova robot installation posture
The installation platform of the robot arm should be stable enough to withstand at least 10
times the maximum torque of the J1 joint, and at least 5 times the weight of the robot arm.
If the robot arm is mounted on a linear axis or a moving platform, the acceleration of the
platform should be low, and high acceleration may trigger the robotic arm's collision detection
mechanism and cause the robotic arm to stop.
Position the mounting holes on the installation platform according to the installation size of the
robot base. Fix the robot arm base on the surface using bolts (4 M6 bolts for Nova 2, and 4 M8 bolts
for Nova 5). You can refer to 5 Mechanical Specifications for the specific dimensions of the robot
base.
Figure 7.2 Base installation
NOTE
The installation posture at the left of the figure is the standard mounting angle. When
installing the robot in a non-standard mounting angle, you need to calibrate the
mounting angle through the software after powering on the robot arm, See the user
guide of the control software for details.
 Loading...
Loading...









