Parameters
04/10 MN04020001Z-EN
116
Braking (P12)
In parameter group P12 you can set different brake functions:
• DC braking,
• Generative braking (brake chopper),
• Mechanical braking (actuation).
The brake functions allow you to reduce undesired coasting and
long coasting times. Mechanical braking also ensures safe
operating states.
DC braking
With DC braking, the frequency inverter supplies the three-phase
stator winding of the three-phase motor with DC current. This
generates a stationary magnetic field which in turn induces a
voltage in the rotor while the rotor is in motion. As the electrical
resistance of the rotor is very low, even small induction can
generate high rotor currents and thus a strong braking effect.
As the speed decreases, the frequency of the induced voltage
reduces and therefore the inductive resistance also. The ohmic
resistance becomes more effective and thus increases the braking
effect. However, the generated braking torque drops off abruptly
before the rotor is at a standstill and disappears completely as
soon as the rotor movement has ended.
h
DC braking is therefore not suitable for holding loads. Nor
for intermediate braking. Once DC braking has been
activated, the motor comes to a standstill.
h
Caution!
Debounced inputs may not be used in the safety circuit
diagram. DC braking results in additional heating of the
motor. Configure the brake torque, set via braking current
(P12.1) and the braking duration (P12.2 and P12.4), as
low as possible therefore.
PNU ID Access right
RUN
Value Description Factory setting
(P1.3)
P12.1 507 - DC braking, current I
e
Set value for the DC current, which supplies the motor during the
DC braking.
The value depends on the rated operational current I
e
of the
frequency inverter: 0.2 x I
e
– 2 x I
e
[A]
The parameter is only active, if a value > 0 has been entered for
P12.2 or P12.4.
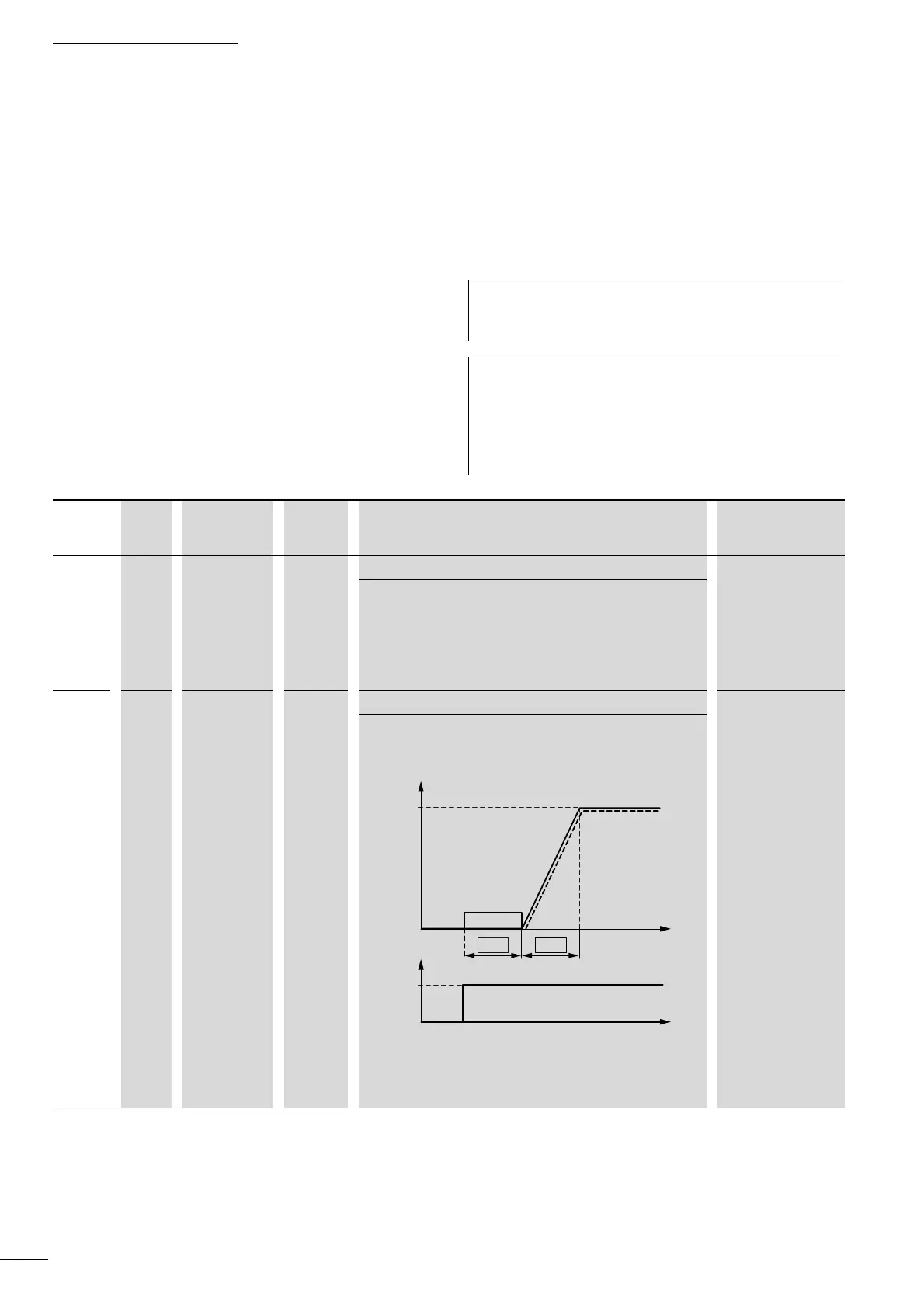
P12.2 516 - DC braking, braking time at start 0.00
0.00 - 600.00 s
The braking time of the DC braking c is activated with the start
command (FWD, REV).
After the time set here has elapsed, the frequency inverter starts
automatically with the acceleration time set at P6.5. The speed of
the motor b follows the characteristic of the output frequency a.
f
t
f
out
P12.2
f
t
P6.5
FWD
REV
a
b
c
 Loading...
Loading...






