14 • iPro Case Controller I&O Manual FM V1.01 026-1738 Rev 1
4.8. CAN Bus Communication Connection
The XEV20D communicates with the iPro Case Controller using the CAN Bus protocol link. The CAN Bus connection will use RS485
wiring standard and the approved wire type is General Cable 92454A (Emerson P/N 135-0600). The polarity of the CAN Bus connection
between iPro and XEV20D is straight polarity (see Figure 4-9). When two XEV20D devices are connected to the iPro Case Controller,
the CAN Bus connection should be in a daisy chain with the last XEV20D device having the CAN Bus termination jumper installed, see
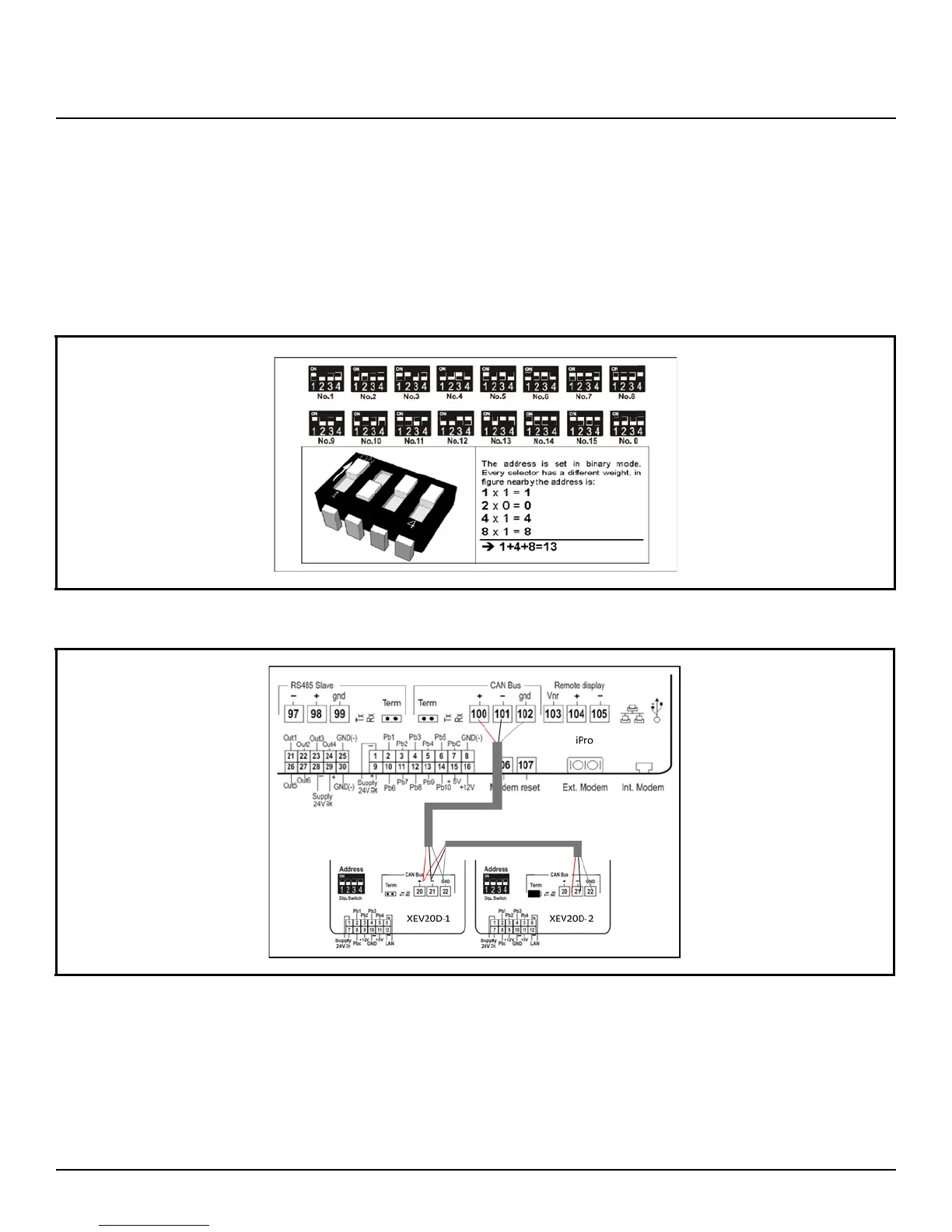
figure 8. For successful communication to occur, the addressing dip switches on the XEV20 must be set correctly. When one (1)
XEV20D driver is being used by the iPro Case Controller, then the dip switch address will be (two) 2, when two (2) XEV20D modules
are being installed, the modules should be address 2 and 3. An example of how to address the device using the dip switches is shown in
Figure 7.
Figure 4-8 - XEV20D Dip Switch Addressing
Figure 4-9 - XEV20D CAN Bus Wiring