Operation & Software Manual
302
Direct Drives & Systems
Chapter E: Appendixes ETEL Doc. - Operation & Software Manual # DSC2P 903 / Ver. F / 3/6/05
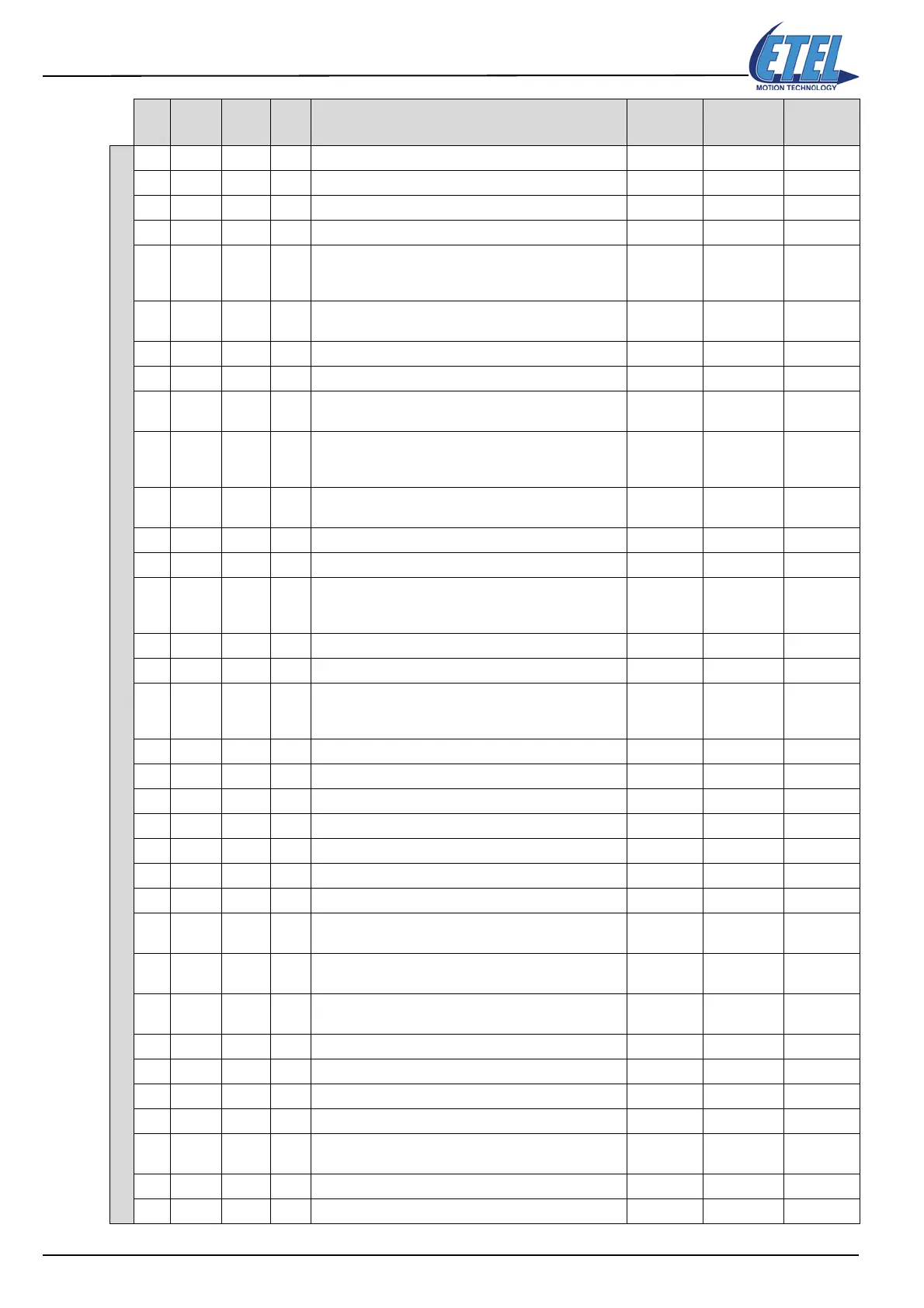
DSCDL parameters
K190 Global enable of real-time function 0 0 1
K191 List of valid real-time lines in the RTI table 0 0 255
K192 List of enable real-time lines in the RTI table 0 0 255
K193 List of pending real-time lines in the RTI table 0 0 255
K194
Time added at the end of the movement where K60 is
kept as force/torque reference. At the end of this time,
K59 is kept as force/torque reference
0 0 600000
K198
The register number is given by K198 when it is equal to
Y or y (ex: Ky.1=...). See EBL2 manual
0 0 65535
K201 MMC Concatenated movement selection 0 0 3
0 Concatenated movement disabled
1
Concatenated movement enabled for MMD=1, 17 and
24
2
Continuous back and forth movement enabled for MMD
= 10, 26, 3 and 19 movement (could be stopped by POS,
BRK, HLT, HLB and HLO commands)
3
One back and forth MMD = 10, 26, 3 and 19 movement
enabled for look-up table movement
K202 MMD Movement type 1 1 32
1 S-curve (jerk time) linear movement
3
Selects a predefined linear movement according to K230
value and executes the trajectory in a time given by
K229
10 Look-up table linear movement
17 S-curve (jerk time) rotary movement
19
Selects a predefined rotary movement according to
K230 value and executes the trajectory in a time given
by K229
24 Infinite rotary movement
26 LKT rotary movement
K203 LTN Look-up table number movement 0 0 7
K204 LTI Time to execute a look-up table movement 10000 4 500000
K205 CAM Came value (in percent). Stretches the user time scale 100 1 100
K206 Brake deceleration (with BRK and HLB command) 1000000 256 2147483647
K207 LKT mode selection 0 0 1
0
LKT movement running to target defined by POS
command
1
LKT movement with same starting and end point. K208
defines the amplitude of the movement
K208
Maximum stroke for LKT movement with K207=1 and for
MMD=10 & 26
0 -2147483648 2147483647
K209 Rotary movement type selection 0 0 2
0 Movement always positive
1 Movement always negative
2 Movement minimum distance
K210 POS
Starts movement (only depth 0) and gives the target
position
0 -2147483648 2147483647
K211 SPD Absolute maximum speed 2000000 1 2147483647
K212 ACC Absolute maximum acceleration and deceleration 1000000 256 2147483647
K Alias
Val
<P1>
Bit #
<P1>
Comment for parameters K
and <P1> of the DSCDL
Def. Val
<P1>
Min. Val
<P1>
Max. Val
<P1>