3
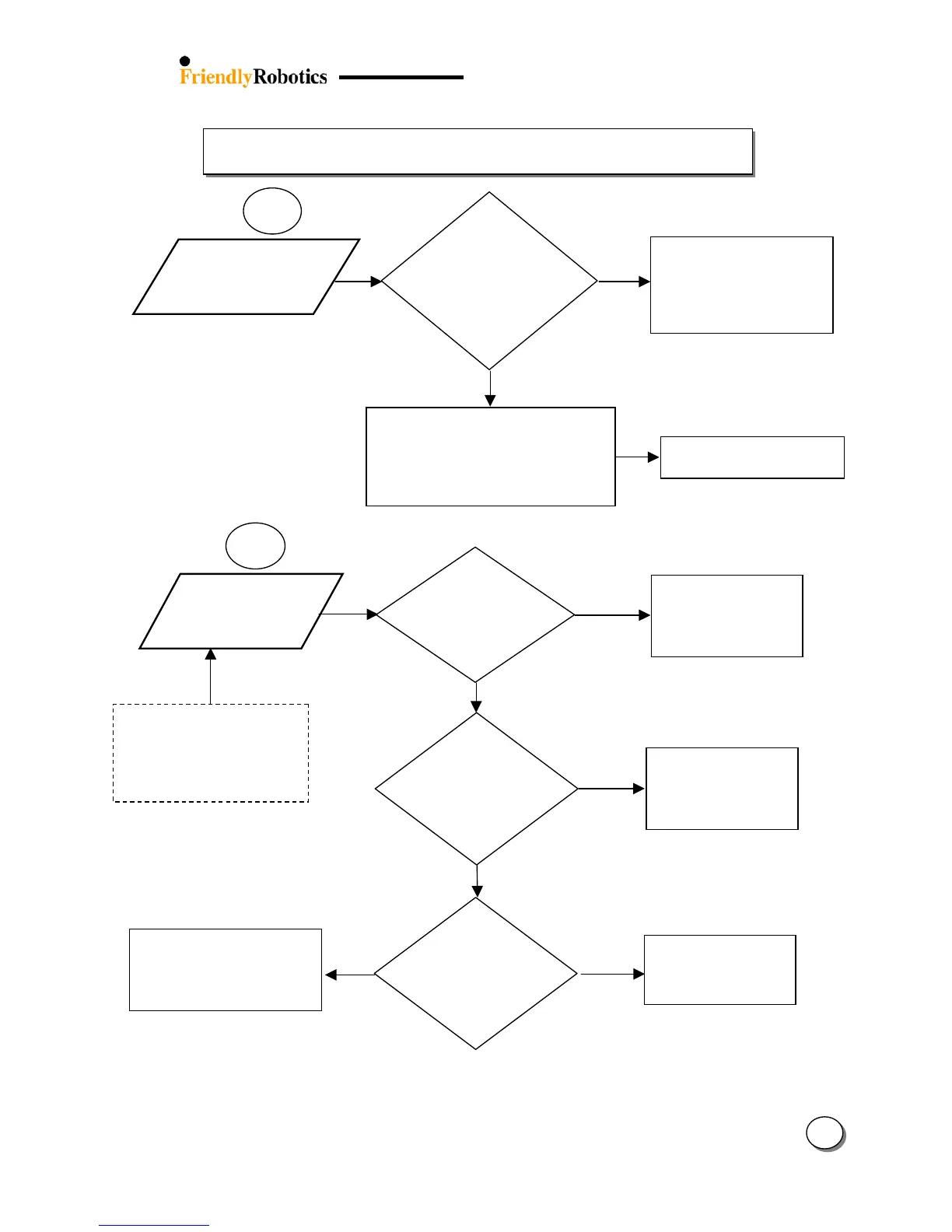
3.2.4 Edge Problems (con.)
19
ES
NO
In narrow passes the wire
sensors readings are affected
by the other wire – this causes
the mower to shift (up to 2
inches/5cm) outside the
perimeter wire center
Does it happen in
areas where the
distance between
the two perimeter
wires is less than
3 meters
?
Robomow is not
centered on the
perimeter wire
3.2.4.2
The normal shift is up to 2inches (5cm).
Narrow passes, side slope, bumpy area,
high grass, turns and wetness can cause
the Robomower to go beyond this
tolerance. If needed, the perimeter wire
should be adjusted respectively.
Perform ‘Ed
e Calibration’ (See
section 5.3.2 – page 5.6)
3.2.4.3
Robomow is
‘zigzagging’ as it
edges (weaves
left and right)
NO
Is there another
adjacent zone
connected to the
same perimeter
switch?
NO
ES
The minimum distance
between 2 adjacent
zones activated by the
same p. switch should
be
ES
Perform ‘Edge calibration (see
section 5.3.2 – page 5.6).
Test ‘Wire sensors’ readings
and replace if needed
lace Main Board
Usually the zigzagging appears
after the mower fails to acquire
the perimeter wire or loses the
wire tracking after a sharp turn
during the edge, high grass or
sloping area in the edge
NO
Perform ‘Drive motor’
test in the ‘Service’
menu and refer to fault
number in section 5.6.1
Drive the mower
manually on a
flat surface –
does it move in a
strai
ES
The minimum distance
between 2 adjacent
zones activated
simultaneously should
be
4m
Is there another
activated
perimeter switch
near this zone?