9.1 Function Code Tables
9-5
Chap. 9 FUNCTION CODES
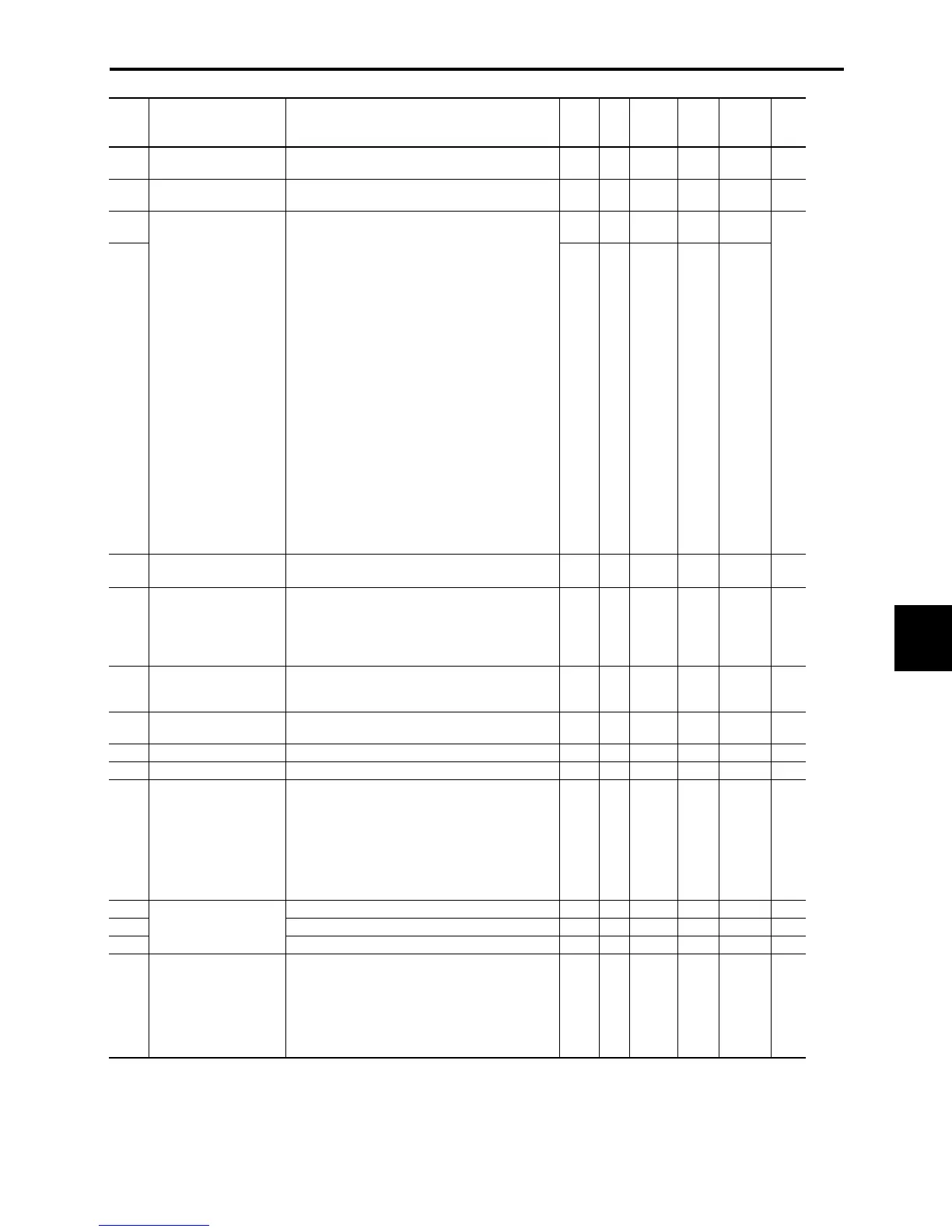
Code Name Data setting range
Incre-
ment
Unit
Change
when
running
Data
copy
Default
setting
Refer
to:
E10 Acceleration Time 2 0.00 to 3600 0.01 s Y Y 6.00 9-17
9-38
E11 Deceleration Time 2 0.00 to 3600 0.01 s Y Y 6.00 9-17
9-38
E20 Status Signal
Assignment to: [Y1]
—— N Y 0
E27 [30A/B/C]
(Mechanical relay
contacts)
To assign a negative logic output to a terminal,
set the value of 1000s shown in ( ) on the table
below to the function code.
(OFF if short-circuited)
0: (1000) Inverter running (RUN)
1: (1001) Frequency equivalence signal (FAR)
2: (1002) Frequency level detection (FDT)
3: (1003) Undervoltage detection signal (LU)
5: (1005) Torque limiting (Current limiting)
(IOL)
6: (1006) Auto-restart after recovery from
instantaneous power failure (IPF)
7: (1007) Early warning for motor overload
(OL)
26: (1026) Retry in operation (TRY)
30: (1030) Lifetime alarm (LIFE)
35: (1035) Inverter running (RUN2)
36: (1036) Overload prevention control
(OLP)
37: (1037) Current detection (ID)
41: (1041) Low level current detection (IDL)
99: (1099) Alarm relay output (for any alarm)
(ALM)
— — N Y 99
9-39
E31
Frequency Detection
(FDT) (Detection level)
0.0 to 400.0 0.1 Hz Y Y 60.0 9-42
E34
Overload Early Warning/
Current Detection/
Low Current Detection
(Level)
0 (Disable)
Current value of 1 to 200% of the rated inverter
current
0.01 A Y Y
1
Y2
Nominal *
1
rated
current of
Fuji
standard
motor
9-42
E35
Current Detection/
Low Current Detection
(Timer)
0.01 to 600.00 0.01 s Y Y 10.00 9-42
E39
Coefficient for Constant
Feeding Rate Time
0.000 to 9.999 0.001 — Y Y 0.000 9-43
E40
PID Display Coefficient A
-999 to 0.00 to 999 0.01 — Y Y 100 9-43
E41
PID Display Coefficient B
-999 to 0.00 to 999 0.01 — Y Y 0.00 9-43
E43 Monitor Item Selection 0: Speed monitor (Select by E48.)
3: Output current
4: Output voltage
9: Input power
10: PID final command value
12: PID feedback value
13: Timer value (Timer operation)
— — Y Y 0 9-43
E45 (Note)
E46
E47
E48 LED Monitor
(Speed monitor item)
0: Output frequency before slip compensation
1: Output frequency after slip compensation
2: Set frequency
4: Load shaft speed in rpm
5: Line speed in m/min
6: Constant feeding rate time
— — Y Y 0 9-44
(Note) Function codes E45 to E47 appear on the LED monitor; however, the FRENIC-Mini series of inverters does not recognize these codes.
*
1
"Fuji's standard torque boost," "Nominal rated current of Fuji standard motor," and "Nominal rated capacity of Fuji standard motor" differ
depending upon the rated input voltage and rated capacity. Refer to Table 9.1 "Fuji Standard Motor Parameters" on page 9-11.

 Loading...
Loading...










