DAC
K
d
= 0.0003 [V/count]
Encoder
K
f
= 4N/2π = 318 [count/rad]
ZOH
2000/(s+2000)
Digital Filter
KP = 12.5, KD = 245, T = 0.001
Therefore,
D(z) = 1030 (z-0.95)/Z
Accordingly, the coefficients of the continuous filter are:
P = 50
D = 0.98
The filter equation may be written in the continuous equivalent form:
G(s) = 50 + 0.98s = .098 (s+51)
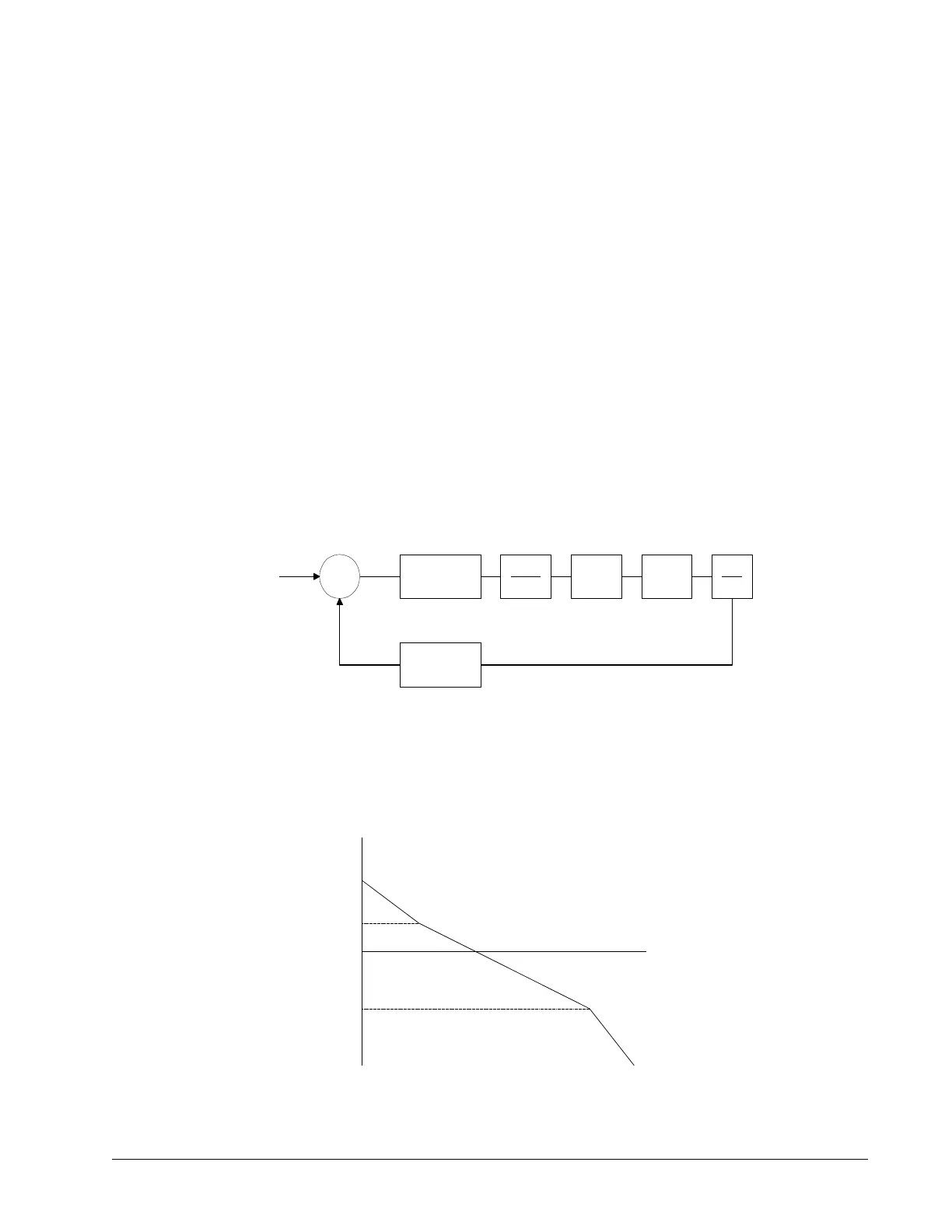
The system elements are shown in Figure 10.6.
Figure 10.6: Mathematical model of the control system
The open loop transfer function, A(s), is the product of all the elements in the loop.
A(s) = 390,000 (s+51)/[s
2
(s+2000)]
To analyze the system stability, determine the crossover frequency, ω
c
at which A(j ω
c
) equals one. This can be
done by the Bode plot of A(j ω
c
), as shown in Figure 10.7.
Figure 10.7: Bode plot of the open loop transfer function
For the given example, the crossover frequency was computed numerically resulting in 200 rad/s.
Chapter 10 Theory of Operation ▫ 160 DMC-41x3 User Manual
50+0.980s
318
V
ENCODER
500
S
2
FILTER
2000
S+2000
0.0003 4
ZOH DAC
AMP
MOTOR
1
4
0.1
50 200 2000 W (rad/s)
Magnitude