page 122
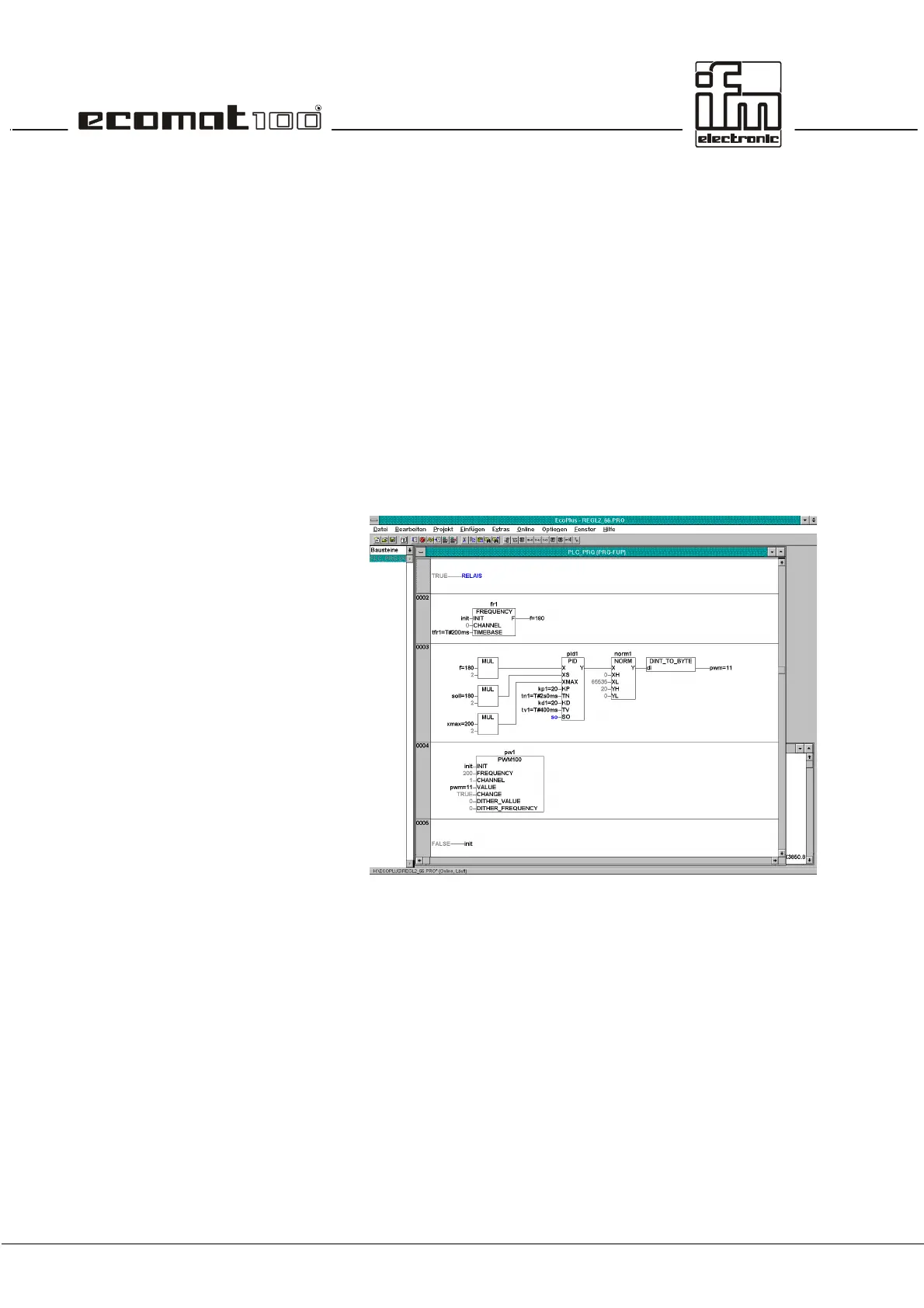
Example Rotational speed control via PID controller
Features:
•
double control range spread
•
self-optimisation
•
adaptation of the controller output Y to a PWM function
module
•
TN was adapted to the relatively slow behavour of the
system (centrifugal mass!)
•
Overshooting is relatively low despite the D share
Special feature
The motor in the example reaches its maximum speed with
20% PWM. The function module NORM takes this into account.
 Loading...
Loading...