page 123
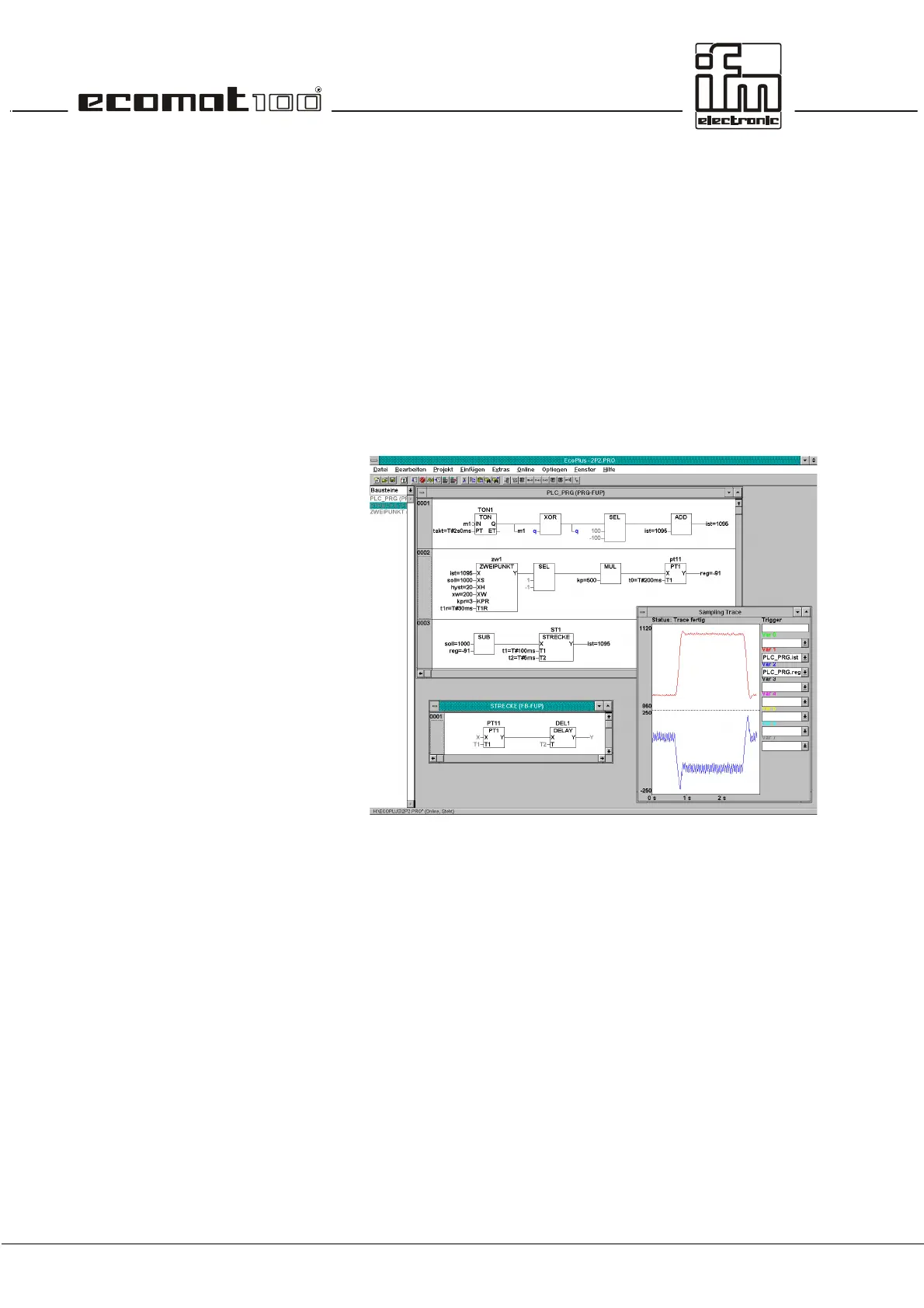
Example P controller
This P controller consists of a 2-point controller with PT1
feeback and a subsequent PT1 element. The controlled system
is simulated.
This controller is particularly robust and is thus suited for difficult
system.
Please note the intended natural oscillation of the controller
caused by its internal feedback. The initial rough switching
behaviour of the 2-point controller is improved and the
switching frequency increases.
 Loading...
Loading...