43
3D sensor
UK
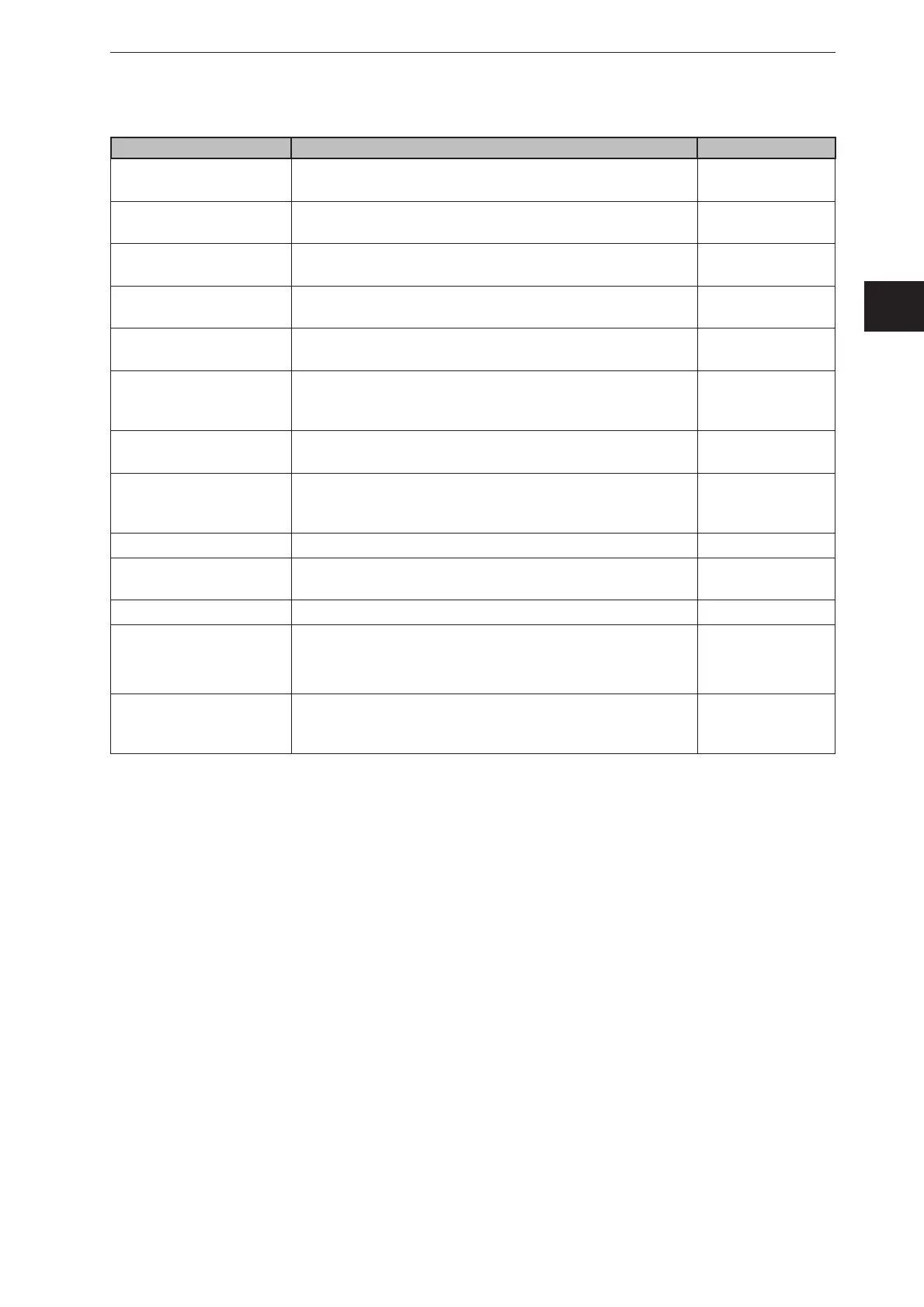
The following element IDs are available:
ID Description Native data type
activeapp_id Active application, shows which of the 32 application-
configurations is currently active
32-bit unsigned
integer
all_cartesian_vector_
matrices
All Cartesian images (X+Y+Z) concatenated to one
package
16-bit signed
integer
all_unit_vector_matrices Matrix of unit vectors. Each element consists of a
3 component vector [e_x, e_y, e_z]
Float32
amplitude_image PMD raw amplitude image 16-bit unsigned
integer
confidence_image Confidence image 8-bit unsigned
integer
distance_image Radial distance image 16-bit unsigned
integer
unit: millimetres
evaltime Evaluation time for current frame in milliseconds 32-bit unsigned
integer
extrinsic_calibration Extrinsic calibration, constisting of 3 translation
parameters (unit: millimeters) and 3 angles
(unit: degree): [t_x, t_y, t_z, alpha_x, alpha_y, alpha_z]
Float32
framerate Current frame rate in Hz Float32
normalized_amplitude_
image
Normalized amplitude image 16-bit unsigned
integer
temp_front1 Invalid temperature, the output is 3276.7 Float32, unit: °C
temp_illu Temperature measured in the device while capturing this
result
Measured on the illumination board
Float32, unit: °C
x_image
y_image
z_image
Cartesian coordinates for each pixel
Each dimension is a separate image
16-bit signed
integer