Troubleshooting
‑102‑
3.1.4 Troubleshooting of Trial Run in Different Control Modes
● SVC mode (F0‑01= 0 (default))
In this mode, the drive controls the motor speed and torque without an encoder
for speed feedback. Auto‑tuning on motor parameters is required to obtain the
motor parameters.
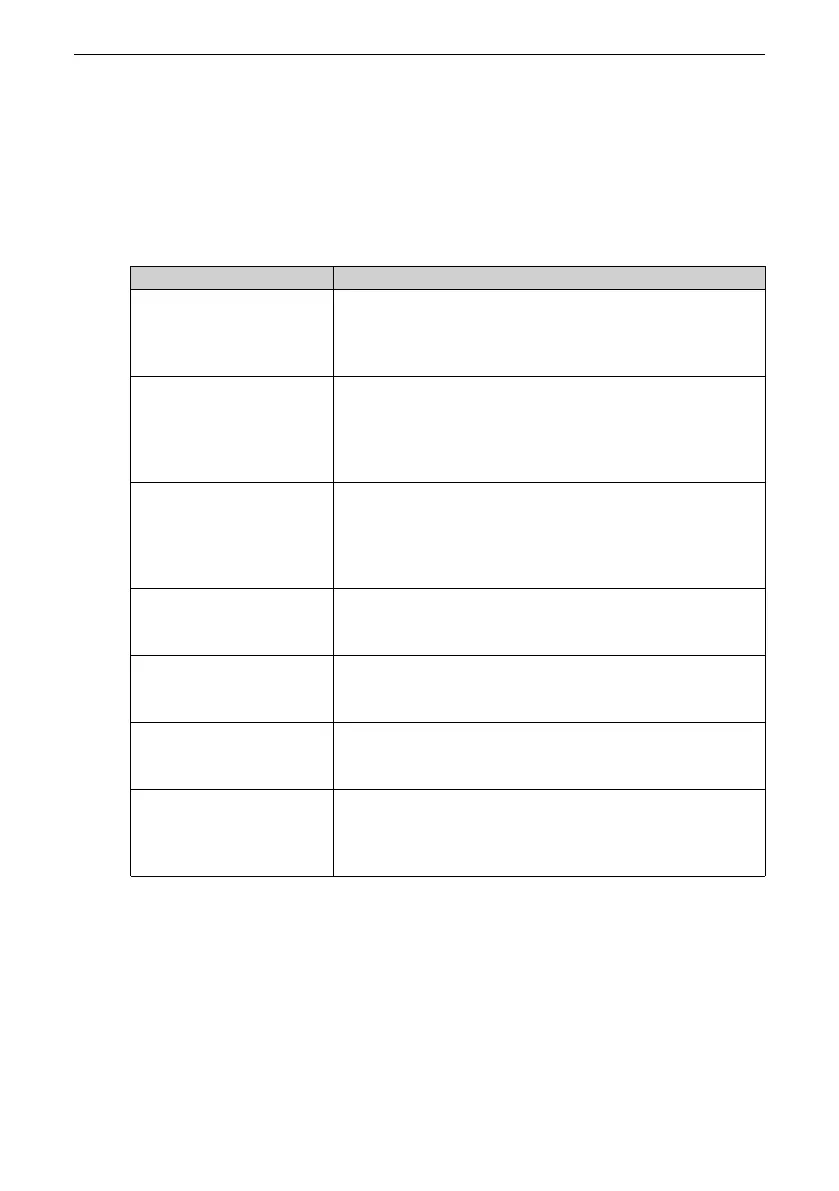
Table 3–3 Troubleshooting in SVC mode
Problem Solution
Overload or overcurrent
during motor start
Set motor parameters F1‑01 to F1‑05 according to the motor
nameplate.
Perform auto‑tuning (F1‑37) on motor parameters. Perform
dynamic complete auto‑tuning if possible.
Slow torque/speed
response and motor
oscillation occur at a
frequency below 5 Hz.
Increase the value of F2‑00 (Speed loop proportional gain)
by the step value of 10 or decrease the value of F2‑01 (Speed
loop integral time) by the step value of 0.05 to improve the
torque/speed responsiveness.
If oscillation occurs, decrease the value of F2‑00 and F2‑01.
Slow torque/speed
response and motor
oscillation occur at a
frequency above 5 Hz.
Increase the value of F2‑03 (Speed loop proportional gain)
by the step value of 10 or decrease the value of F2‑04 (Speed
loop integral time) by the step value of 0.05 to improve the
torque/speed responsiveness.
If oscillation occurs, decrease the value of F2‑03 and F2‑04.
Low speed accuracy If the speed deviation is too large when the motor runs with
load, increase the value of F2‑06 (Vector control slip
compensation gain) by the step value of 10%.
Obvious speed fluctuation Increase the value of A9‑05 (Filter time constant of speed
loop) by the step value of 0.001s when motor speed
fluctuates abnormally.
Excessive motor noise
Increase the value of F0‑15 (Carrier frequency) by the step
value of 1.0 kHz. (Note that increasing the carrier frequency
will lead to an increase in the motor leakage current.)
Insufficient motor torque
or force
Check whether the torque upper limit is too low. If yes,
increase the value of F2‑10 (Torque upper limit in speed
control mode) in the speed control mode or the value of the
torque reference in the torque control mode.
● FVC mode (F0‑01 = 1)
This mode is applicable to scenarios with an encoder for speed feedback. In this
mode, you need to set the encoder pulses per revolution, encoder type, and
encoder direction correctly and perform auto‑tuning on motor parameters.

 Loading...
Loading...









