Commissioning and Trial Run
‑62‑
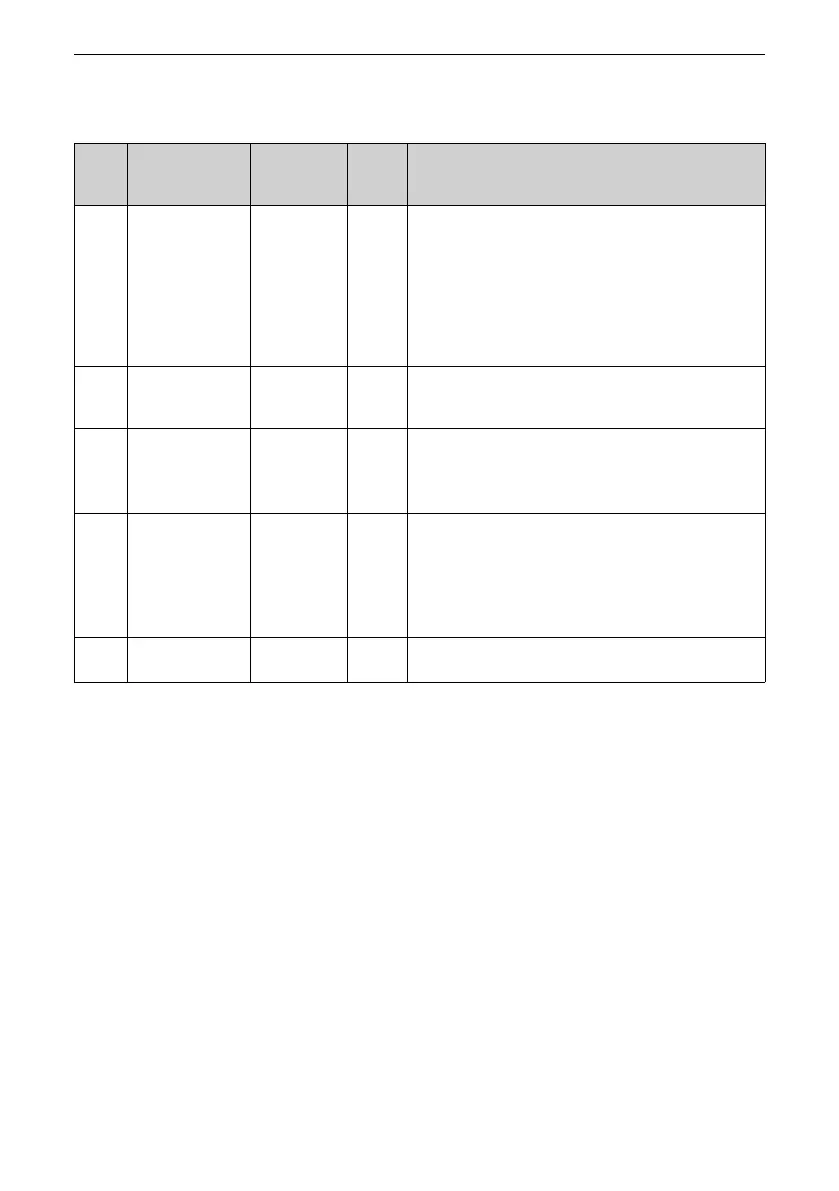
2.2.18Stop Parameter Settings
Param
eter
Code
Parameter Name Value Range Default Parameter Code
F6‑10 Stop mode 0: Decelerate
to stop
1: Coast to
stop
2: Stop at
maximum
capability
0 0: Decelerate to stop
After the stop command becomes active, the AC drive
decreases the output frequency based on the deceleration
time, and stops when the frequency is reduced to 0.
1: Coast to stop
After the stop command becomes active, the drive stops
output immediately and the motor coasts to stop based on
the mechanical inertia.
F6‑11 Start frequency of
DC braking for stop
0.00 Hz to F0‑
10
0.00 Hz During decelerating to stop, the drive starts DC braking when
the operating frequency drops below the frequency set by F6‑
11.
F6‑12 Waiting time of DC
braking for stop
0.0s to 100.0s 0.0s When the running frequency decreases to the value set by F6‑
11, the AC drive stops output for a period set by F6‑12 and
then starts DC braking. This prevents faults such as
overcurrent caused by DC braking at a high speed.
F6‑13 DC braking current
for stop
0% to 150% 50% The higher the DC braking current, the stronger the braking
force. The value 100.0% corresponds to the rated current of
the motor. The default upper limit of the DC braking current
for stop is 80% of the rated drive current,
which can be set by F6‑34. The maximum upper limit of the DC
braking current for stop is 120% of the rated drive current.
F6‑14 DC braking time for
stop
0.0s to 100.0s 0.0s This parameter specifies the holding time of DC braking time.
If it is set to 0, DC braking is disabled.
2.2.19(Optional) AI Settings
Functions of the AI can be set by using the DIP switches on the main control board, as
summarized in the following table.

 Loading...
Loading...









