54 | Fieldbus Guide | Version 1.02 www.invertekdrives.com
11
Additional Status Registers
11. Control & Status Registers
11.1. Control Registers
When controlling the drive through any fieldbus network it is recommended to use the registers below. These registers support the Modbus
RTU Function Code Write Multiple Registers and so all registers can be set in a single transaction greatly speeding up the drive control.
These registers are pre-mapped to the CAN RX PDO1 and are also used in the EDS file for Ethernet/IP communication.
The functions are described more fully in section 11.2. Standard Status Registers on page 55.
Name
Modbus
RTU
Register
CAN
Open
Index
Sub
Index
PDO
Map
Parameter
Number
Upper
Byte
Lower
Byte
Format Type Scaling
PDO0 1 2000h 0 Y - Control Word WORD R/W See Below
PDO1 2 2001h 0 Y - Frequency Setpoint S16 R/W 1dp, e.g. 100 = 10.0Hz
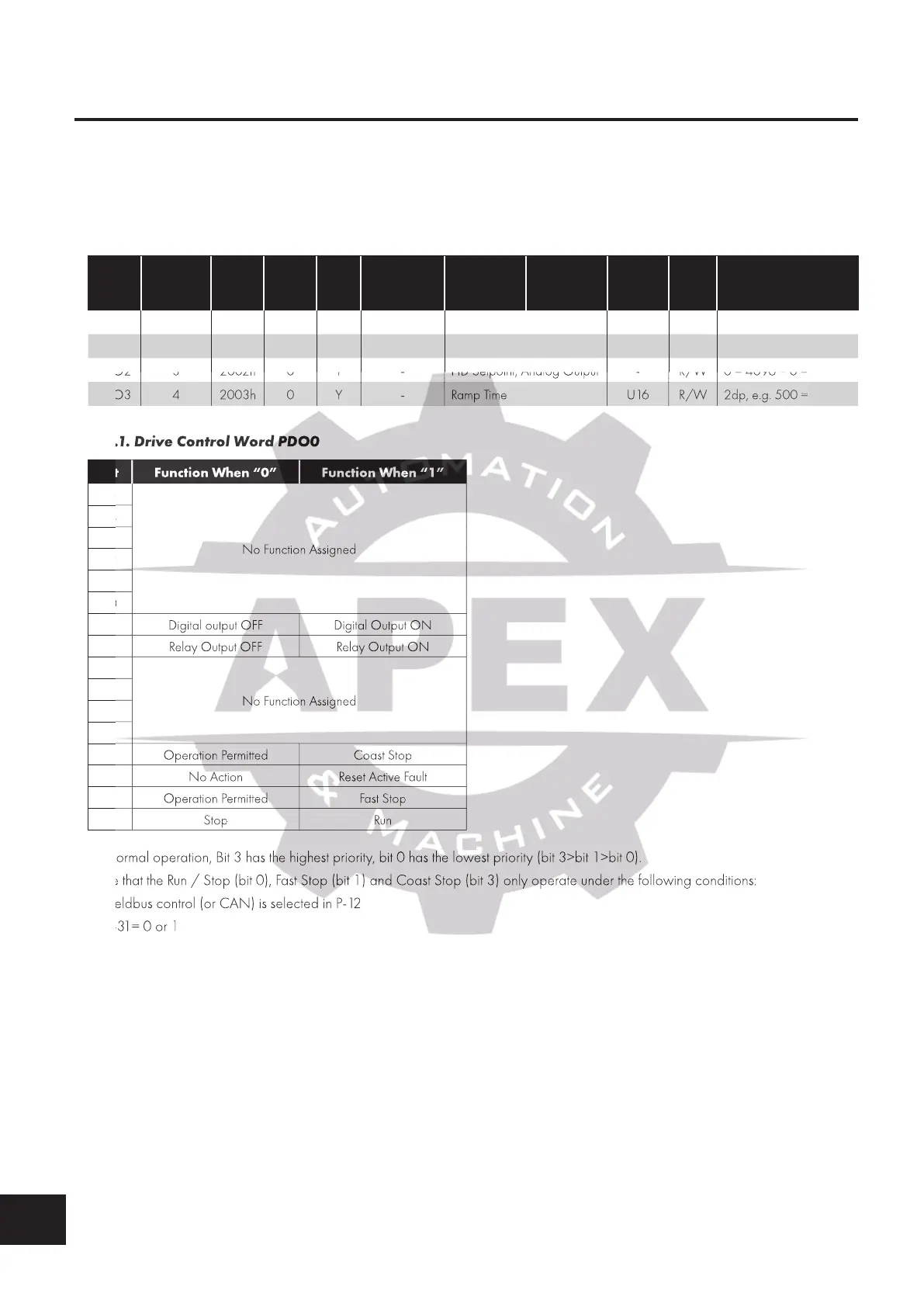
PDO2 3 2002h 0 Y - PID Setpoint, Analog Output - R/W 0 – 4096 = 0 – 100%
PDO3 4 2003h 0 Y - Ramp Time U16 R/W 2dp, e.g. 500 = 5.00s
11.1.1. Drive Control Word PDO0
Bit Function When “0” Function When “1”
15
No Function Assigned
14
13
12
11
10
9 Digital output OFF Digital Output ON
8 Relay Output OFF Relay Output ON
7
No Function Assigned
6
5
4
3 Operation Permitted Coast Stop
2 No Action Reset Active Fault
1 Operation Permitted Fast Stop
0 Stop Run
For normal operation, Bit 3 has the highest priority, bit 0 has the lowest priority (bit 3>bit 1>bit 0).
Note that the Run / Stop (bit 0), Fast Stop (bit 1) and Coast Stop (bit 3) only operate under the following conditions:
Fieldbus control (or CAN) is selected in P-12
P-31= 0 or 1
Otherwise, Run / Stop function is controlled by drive control terminals.
Reset function (bit 2) is always active when the drive operates in Fieldbus or CAN mode.
Bits 8 and 9 may optionally be used to control the state of the built in Analog Output in Digital Mode and the Output relay. This
function is activated if selected by the relevant parameter:
Relay Output P-18
Digital Output, P-25
Refer to the programming Guide for further information.
11.1.2. Frequency Setpoint PDO1
Frequency Setpoint value is transferred with one decimal place (200 = 20.0Hz).
The maximum value is limited by P-01.
Sending a value that exceeds P-01 will result in an Exception error.
PDO2 3 2002h 0 Y - PID Setpoint, Analog Output - R/W 0 – 4096 = 0 – 100%
PDO2 3 2002h 0 Y - PID Setpoint, Analog Output - R/W 0 – 4096 = 0 – 100%
PDO2 3 2002h 0 Y - PID Setpoint, Analog Output - R/W 0 – 4096 = 0 – 100%
PDO2 3 2002h 0 Y - PID Setpoint, Analog Output - R/W 0 – 4096 = 0 – 100%
PDO2 3 2002h 0 Y - PID Setpoint, Analog Output - R/W 0 – 4096 = 0 – 100%
PDO2 3 2002h 0 Y - PID Setpoint, Analog Output - R/W 0 – 4096 = 0 – 100%
PDO2 3 2002h 0 Y - PID Setpoint, Analog Output - R/W 0 – 4096 = 0 – 100%
PDO2 3 2002h 0 Y - PID Setpoint, Analog Output - R/W 0 – 4096 = 0 – 100%
PDO2 3 2002h 0 Y - PID Setpoint, Analog Output - R/W 0 – 4096 = 0 – 100%
PDO2 3 2002h 0 Y - PID Setpoint, Analog Output - R/W 0 – 4096 = 0 – 100%
PDO3 4 2003h 0 Y - Ramp Time
PDO3 4 2003h 0 Y - Ramp Time
PDO3 4 2003h 0 Y - Ramp Time
PDO3 4 2003h 0 Y - Ramp Time
PDO3 4 2003h 0 Y - Ramp Time
PDO3 4 2003h 0 Y - Ramp Time
PDO3 4 2003h 0 Y - Ramp Time
PDO3 4 2003h 0 Y - Ramp Time
R/W 2dp, e.g. 500 = 5.00s
R/W 2dp, e.g. 500 = 5.00s
11.1.1. Drive Control Word PDO0
Bit Function When “0” Function When “1”
Bit Function When “0” Function When “1”
Bit Function When “0” Function When “1”
For normal operation, Bit 3 has the highest priority, bit 0 has the lowest priority (bit 3>bit 1>bit 0).
Note that the Run / Stop (bit 0), Fast Stop (bit 1) and Coast Stop (bit 3) only operate under the following conditions:
Fieldbus control (or CAN) is selected in P-12

 Loading...
Loading...
