Version 1.02 | Fieldbus Guide | 57www.invertekdrives.com
11
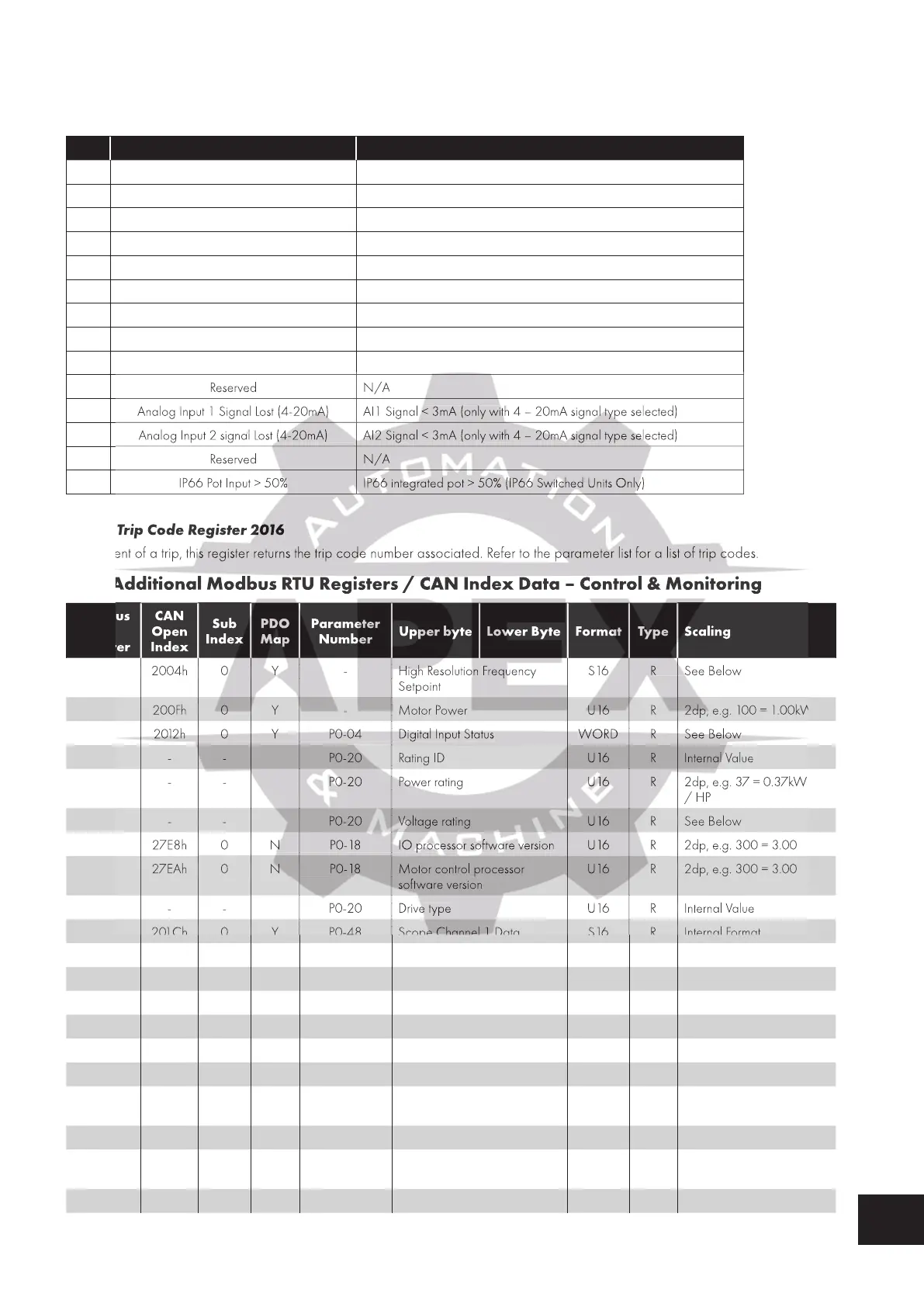
Additional Status Registers
11.3.2. IO Status Word - Register 2005
This register provides an extended status indication of drive input and output signal status.
Bit Definition Bit is HIGH under the following conditions:
0 DI1 Status DI1 ON
1 DI2 Status DI2 ON
2 DI3 Status DI3 ON
3 DI4 Status DI4 ON
4, 5 Reserved N/A
6 IP66 Switch FWD IP66 FWD Switch FWD (IP66 Switched Drives only)
7 IP66 Switch REV IP66 FWD Switch REV (IP66 Switched Drives only)
8 Digital Output Status DO HIGH OR AO > 0 (Terminals 8 & 9)
9 Relay Output Status Output Relay Closed
10 ,11 Reserved N/A
12 Analog Input 1 Signal Lost (4-20mA) AI1 Signal < 3mA (only with 4 – 20mA signal type selected)
13 Analog Input 2 signal Lost (4-20mA) AI2 Signal < 3mA (only with 4 – 20mA signal type selected)
13 Reserved N/A
14 IP66 Pot Input > 50% IP66 integrated pot > 50% (IP66 Switched Units Only)
11.3.3. Trip Code Register 2016
In the event of a trip, this register returns the trip code number associated. Refer to the parameter list for a list of trip codes.
11.4. Additional Modbus RTU Registers / CAN Index Data – Control & Monitoring
Modbus
RTU
Register
CAN
Open
Index
Sub
Index
PDO
Map
Parameter
Number
Upper byte Lower Byte Format Type Scaling
5 2004h 0 Y - High Resolution Frequency
Setpoint
S16 R See Below
10 200Fh 0 Y - Motor Power U16 R 2dp, e.g. 100 = 1.00kW
11 2012h 0 Y P0-04 Digital Input Status WORD R See Below
12 -- P0-20 Rating ID U16 R
Internal Value
13 -- P0-20 Power rating U16 R 2dp, e.g. 37 = 0.37kW
/ HP
14 -- P0-20 Voltage rating U16 R See Below
15 27E8h 0 N P0-18 IO processor software version U 16 R 2dp, e.g. 300 = 3.00
16 27EAh 0 N P0-18 Motor control processor
software version
U16 R 2dp, e.g. 300 = 3.00
17 -- P0-20 Drive type U 16 R Internal Value
18 201Ch 0 Y P0-48 Scope Channel 1 Data S16 R Internal Format
19 201Dh 0 Y P0-48 Scope Channel 2 Data S16 R Internal Format
- 201Eh 0 Y P0-49 Scope Channel 3 Data S16 R Internal Format
- 201Fh 0 Y P0-49 Scope Channel 4 Data S16 R Internal Format
20 2013h 0 Y P0-01 Analog 1 input result U16 R 1dp, e.g. 500 = 50.0%
21 2014h 0 Y P0-02 Analog 2 input result U16 R 1dp, e.g. 500 = 50.0%
- 2015h 0 Y - Analog Output % U16 R 1dp, e.g. 500 = 50.0%
22 -- P0-03 Pre-Ramp Speed Reference
Value
S16 R 1dp, e.g. 500 = 50.0Hz
23 2011h 0 Y P0-08 DC Bus Voltage U16 R 600 = 600 Volts
24 - P0-09 Drive Power Stage
Temperature
S16 R 50 = 50°C
- 2043h 0 Y - Control board temperature S16 R 50 = 50°C
Analog Input 1 Signal Lost (4-20mA) AI1 Signal < 3mA (only with 4 – 20mA signal type selected)
Analog Input 1 Signal Lost (4-20mA) AI1 Signal < 3mA (only with 4 – 20mA signal type selected)
Analog Input 2 signal Lost (4-20mA) AI2 Signal < 3mA (only with 4 – 20mA signal type selected)
Analog Input 2 signal Lost (4-20mA) AI2 Signal < 3mA (only with 4 – 20mA signal type selected)
IP66 integrated pot > 50% (IP66 Switched Units Only)
11.3.3. Trip Code Register 2016
In the event of a trip, this register returns the trip code number associated. Refer to the parameter list for a list of trip codes.
11.4. Additional Modbus RTU Registers / CAN Index Data – Control & Monitoring
Upper byte Lower Byte Format Type Scaling
Upper byte Lower Byte Format Type Scaling
Upper byte Lower Byte Format Type Scaling
Upper byte Lower Byte Format Type Scaling
Upper byte Lower Byte Format Type Scaling
5 2004h 0 Y - High Resolution Frequency
5 2004h 0 Y - High Resolution Frequency
5 2004h 0 Y - High Resolution Frequency
5 2004h 0 Y - High Resolution Frequency
5 2004h 0 Y - High Resolution Frequency
5 2004h 0 Y - High Resolution Frequency
2012h 0 Y P0-04 Digital Input Status
2012h 0 Y P0-04 Digital Input Status
2012h 0 Y P0-04 Digital Input Status
2012h 0 Y P0-04 Digital Input Status
2012h 0 Y P0-04 Digital Input Status
27E8h 0 N P0-18 IO processor software version
27E8h 0 N P0-18 IO processor software version
27E8h 0 N P0-18 IO processor software version
27E8h 0 N P0-18 IO processor software version
27E8h 0 N P0-18 IO processor software version
27EAh 0 N P0-18 Motor control processor
27EAh 0 N P0-18 Motor control processor
27EAh 0 N P0-18 Motor control processor
27EAh 0 N P0-18 Motor control processor
27EAh 0 N P0-18 Motor control processor
201Ch 0 Y P0-48 Scope Channel 1 Data
201Ch 0 Y P0-48 Scope Channel 1 Data
201Ch 0 Y P0-48 Scope Channel 1 Data
201Ch 0 Y P0-48 Scope Channel 1 Data
201Ch 0 Y P0-48 Scope Channel 1 Data

 Loading...
Loading...
