DA180 series basic AC servo drive Communication
-251-
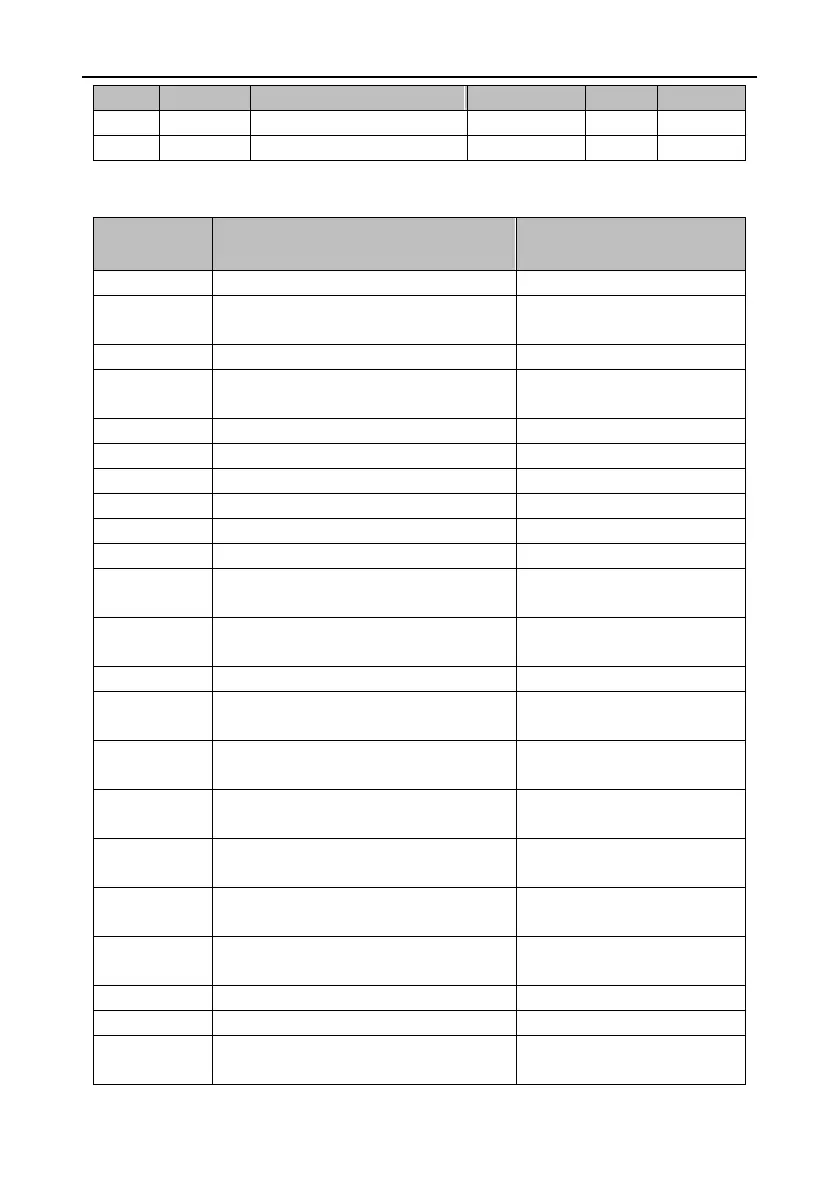
Table 8-8 CANopen fault codes
32-bit fault code
(16-bit error code + 16-bit
additional information)
Brake pipe fault (for models of 7.5kW or
above)
Encoder fault–Encoder offline
Encoder fault–Encoder feedback deviation
too large
Encoder fault– Parity error
Encoder fault–Frame error
Encoder fault–Short frame error
Encoder fault–Encoder timeout
Encoder fault–Second-encoder timeout
Encoder fault–Encoder battery low-voltage
alarm
Encoder fault–Encoder battery
undervoltage fault
Encoder fault–Encoder overheating
Encoder fault–Encoder EEPROM writing
error
Encoder fault–No data in encoder
EEPROM
Encoder fault–Encoder EEPROM data
check error
Current sensor fault–Phase-U current
sensor fault
Current sensor fault–Phase-V current
sensor fault
Current sensor fault–Phase-W current
sensor fault
System initialization fault
Setting fault–Motor model not exist
Setting fault–Motor and drive model not
match
 Loading...
Loading...
