Goodrive35 Series Closed-loop Vector Control VFD Communication protocol
235
Note: In the preceding command description, spaces are added to a command just for explanatory
purposes. In practical applications, no space is required in the commands.
10.4.8.3 Example of continuous writing command10H
Example 1: make the VFD whose address is 01H run forward at 10 Hz. Refer to the instruction of
2000H and 0001. Set the address of "communication setting frequency" is 2001H and 10 Hz
corresponds to 03E8H. See the table below.
Example 1: Set the VFD whose address is 01H to be forward running at the frequency of 10 Hz. Refer
to the table of other function parameters, the address of "Communication-based control command" is
2000H, 0001H indicates forward running, and the address of "Communication-based value setting" is
2001H, as shown in the following figure. 10 Hz is 03E8H in the hexadecimal form.
Communication-based
control command
0006H: Coast to stop (emergency
stop)
Communication-based
value setting
Communication-based frequency
setting (0–Fmax, unit: 0.01 Hz)
PID setting, range (0–1000, 1000
corresponding to 100.0%)
In the actual operation, set P00.01 to 2 and P00.06 to 8.
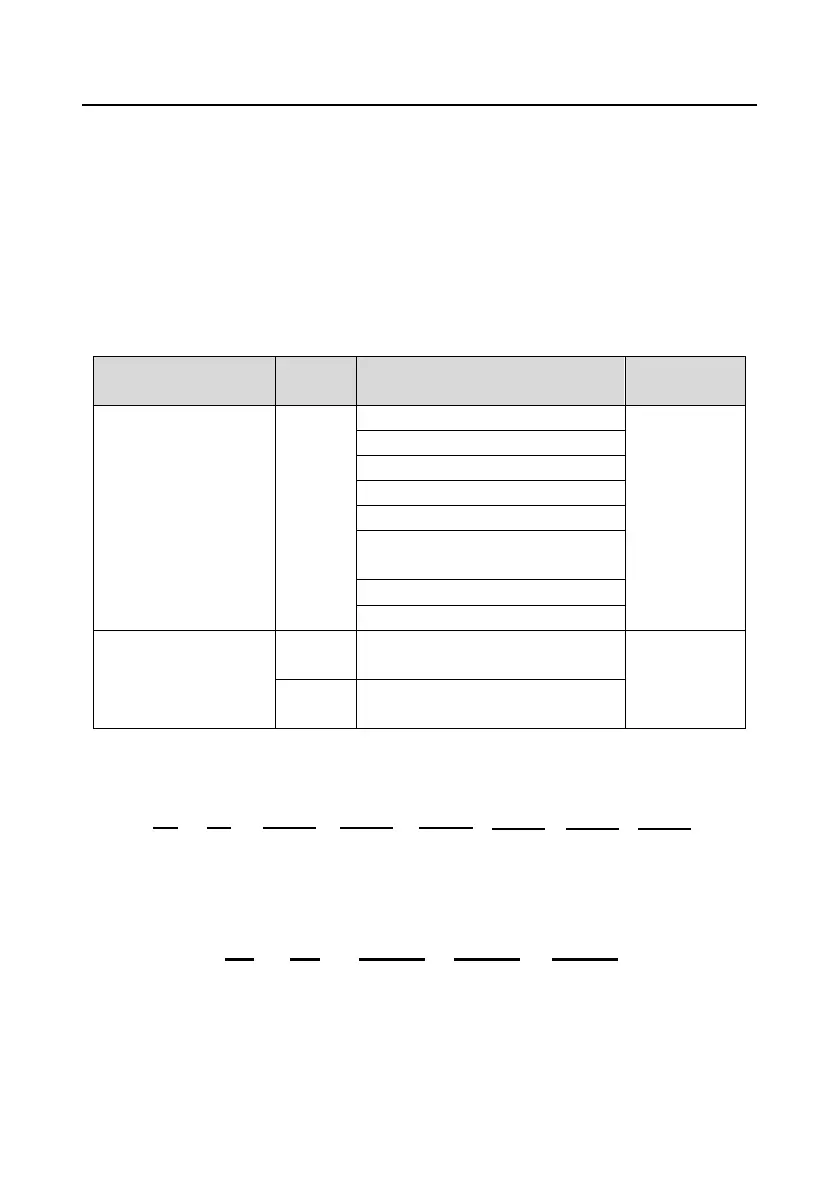
The command transmitted by the master is as follows:
Parameter
address
VFD
address
Continuous
write
command
Number of
bytes
Data
quantity
01 10 20 00 00 02 04
Froward
running
00 01
10 Hz
03 E8
CRC check
3B 10
If the operation is successful, the following response is returned:
Parameter
address
VFD
address
Continuous
write
command
CRC check
Data
quantity
01 10 20 00 00 02 4A 08
Example 2: Set "Acceleration time" of the VFD whose address is 01H to 10s, and "Deceleration time"
to 20s.

 Loading...
Loading...