speed compensation characteristic mentioned here
means reducing the threshold of the overload
protection of the motor whose running frequency is
below 30 Hz.
2: Variable frequency motor (without low speed
compensation) Because the heat-releasing effect of
the specific motors won’t be impacted by the rotation
speed, it is not necessary to adjust the protection
value during low-speed running.
Motor overload multiple M = Iout/(In × K)
In is the rated current of the motor, Iout is the output
current of the VFD and K is the motor overload
protection coefficient.
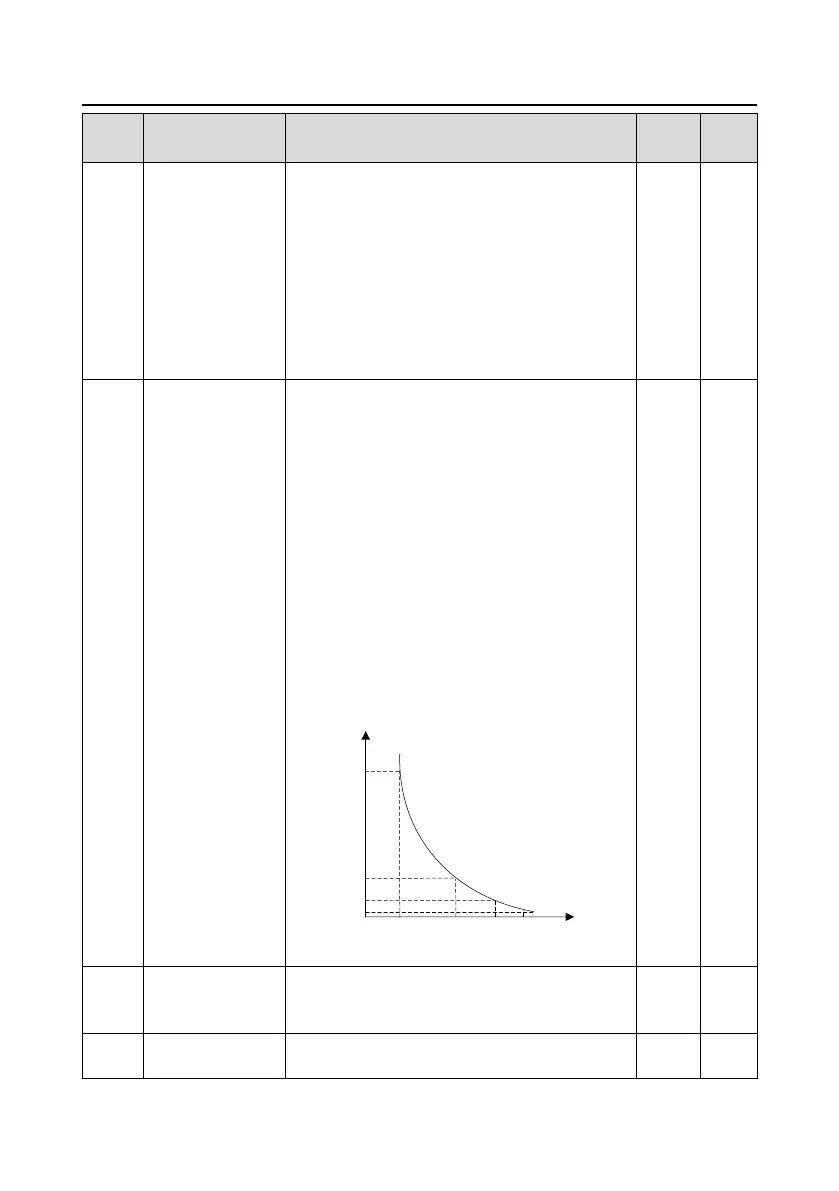
The smaller K is, the greater M is, and the more
likely protection is implemented.
When M=116%, protection is performed after motor
overload lasts for 1 hour; when M=150%, protection
is performed after motor overload lasts for 12
minutes; when M=180%, protection is performed
after motor overload lasts for 5 minutes; when
M=200%, protection is performed after motor
overload lasts for 60 seconds; and when M≥ 400%,
protection is performed immediately.
 Loading...
Loading...
