SV-DA200 series AC servo drives Faults and solutions
‐93‐
P0.35
Software limit of forward
position control
Setting range Default Unit Available mode
-(2
31
-1)~(2
31
-1) 0 reference unit P F
This parameter is used to set the software limit of the forward position control.
Note: The function is valid when it is above P0.36.
P0.35
Data size 32bit Data format DEC
Modbus address 1070,1071 CANopen address 0x2023, 0x00
P0.36
Software limit of reverse
position control
Setting range Default Unit Available mode
-(2
31
-1)~(2
31
-1) 0 reference unit P F
This parameter is used to set the software limit of the reverse position control.
Note: The function is valid when it is less than P0.35.
P0.36
Data size 32bit Data format DEC
Modbus address 1072,1073 CANopen address 0x2024, 0x00
P0.37
Position command
mode
Setting range Default Unit Available mode
0~1 0 - P F
This parameter is used to set the position command mode when P0.20 is set to 1 and it is invalid
for other modes.
Setting value Position command mode
[0] Incremental (the position command input is the variation relative to current position)
1 Absolute(the position command input is the target position)
P0.37
Data size 16bit Data format DEC
Modbus address 1074,1075 CANopen address 0x2025, 0x00
6.1.3 Speed and torque control
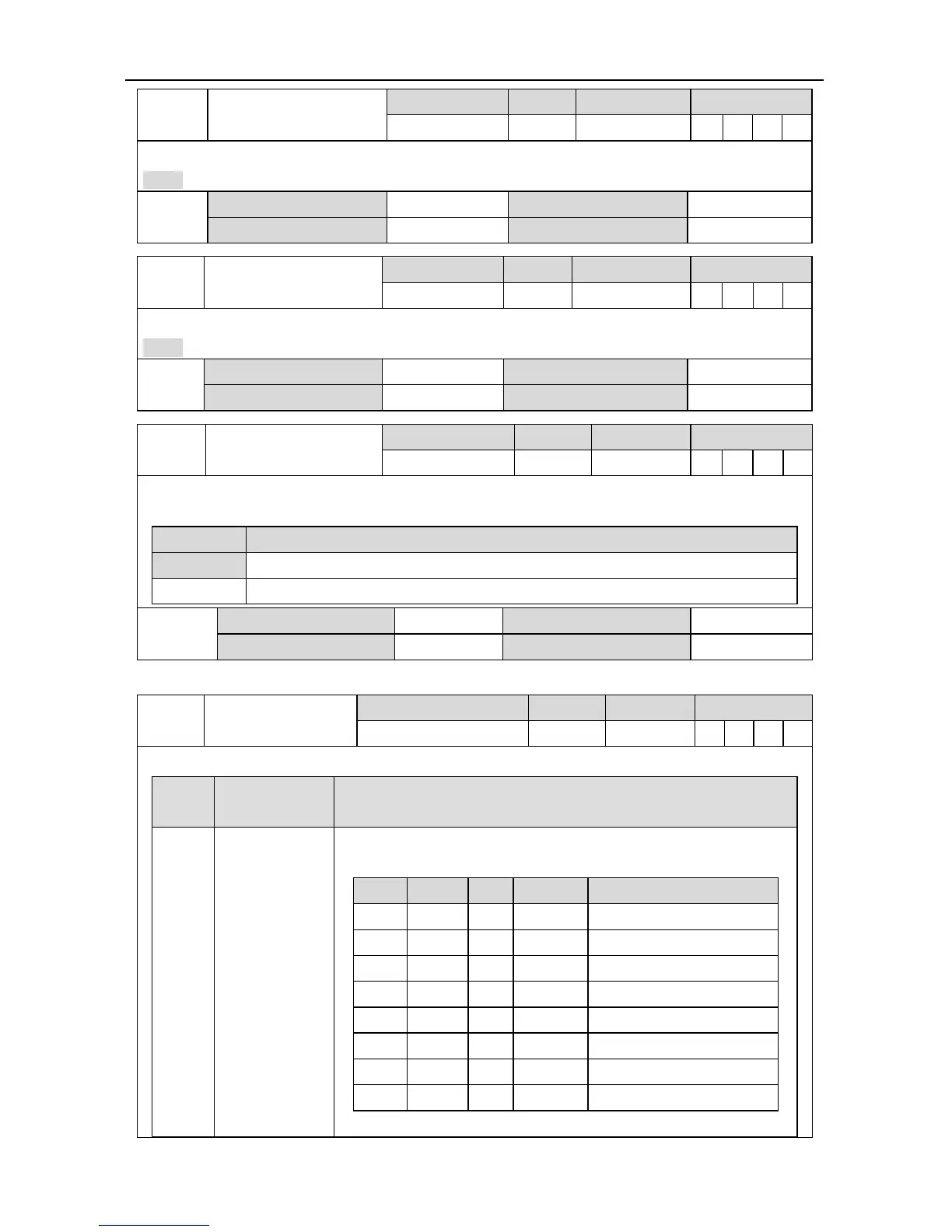
P0.40
Speed command
selection
Setting range Default Unit Available mode
0~5 1 - S
This parameter is used to select the command source of the speed control:
Setting
value
Input mode Instruction
0 Internal speed
P3.00~P3.09 can be selected to control the internal multi-step
speed (SPD1 is 0x00A, SPD2 is 0x00B, SPD3 is 0x00C):
SPD3 SPD2 SPD1 Parameter Speed mode
0 0 0 P0.46 Internal speed 1
0 0 1 P0.47 Internal speed 2
0 1 0 P0.48 Internal speed 3
0 1 1 P0.49 Internal speed 4
1 0 0 P0.50 Internal speed 5
1 0 1 P0.51 Internal speed 6
1 1 0 P0.52 Internal speed 7
1 1 1 P0.53 Internal speed 8
Please refer to the detailed instruction of P0.46~P0.53.
 Loading...
Loading...
