SV-DA200 series AC servo drives Faults and solutions
‐114‐
P2.25
Data size 16bit Data format DEC
Modbus address 1450,1451 CANopen address 0x2219,0x00
P2.26
Switching time of
position gain
Setting range Default Unit Available mode
0~10000 0 ms P F
In position control, if the offset between P2.00 and P2.04 is large, setting this parameter can
control the torque changing and vibration caused by increasing gain during switching from small
gain to large gain. The parameter is invalid when the position gain is switched from a large value
to a smaller one.
P2.26
Data size 16bit Data format DEC
Modbus address 1452,1453 CANopen address 0x221A,0x00
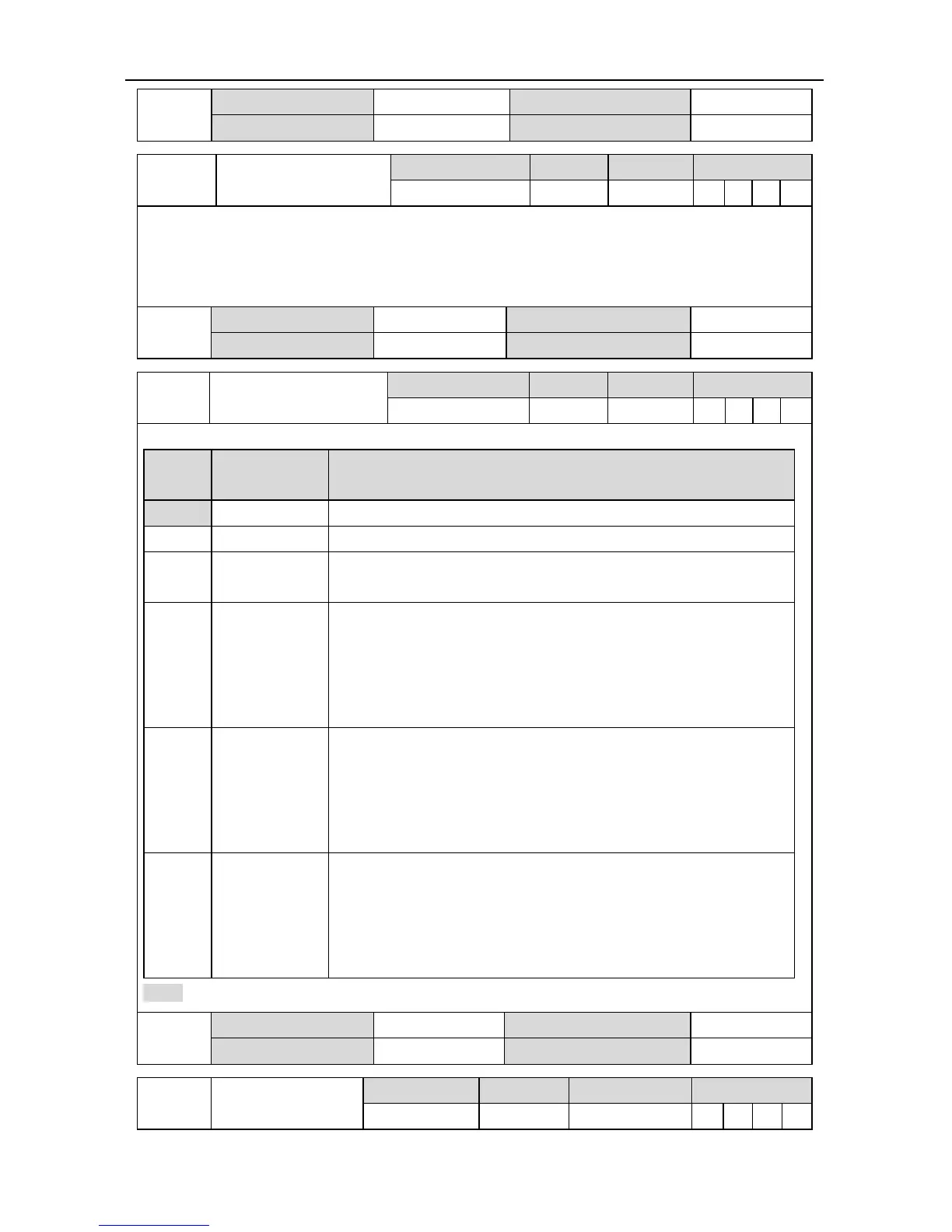
P2.27
Switching mode of
speed control
Setting range Default Unit Available mode
0~5 0 - S
The trigger conditions of gain switching during speed control are as below:
Setting
value
Switching
condition
Gain condition
[0] 1
st
gain fixed Be fixed in 1
st
gain [P2.00~P2.04]
1 2
nd
gain fixed Be fixed in 2
nd
gain [P2.05, P2.06, P2.08, P2.09]
2
Switching input
with gain
Invalid: 1
st
gain
Valid: 2
nd
gain
3
To rq ue
command
In the previous 1
st
gain, if the absolute value of the torque command
exceed (level+delay) [0.1%], it will switch to 2
nd
gain.
In the previous 2
nd
gain, if the absolute value of the torque
command keeps below (level-delay)[0.1%] in the delay time, it will
return to 1
st
gain.
4
Speed
command
variable
In previous 1
st
gain, if the absolute value of speed command variable
exceed (level+delay) [10r/min/s], it will switch to 2
nd
gain
In the previous 2
nd
gain, if the absolute value of the speed
command variable keeps below (level-delay) [10r/min/s] in the
delay time, it will return to 1
st
gain.
5
Speed
command
In the previous 1
st
gain, if the absolute value of the speed command
exceed (level+delay) [r/min/s], it will switch to 2
nd
gain.
In the previous 2
nd
gain, if the absolute value of the speed
command keeps below (level-delay) [r/min/s] and in the delay time,
it will return to 1
st
gain.
Note: The parameter is invalid for the position gain. The actual position gain is always 1st gain.
P2.27
Data size 16bit Data format DEC
Modbus address 1454,1455 CANopen address 0x221B,0x00
P2.28
Delay time of speed
control switching
Setting range Default Unit Available mode
0~10000 0 ms S
 Loading...
Loading...
