SV-DA200 series AC servo drives Faults and solutions
‐138‐
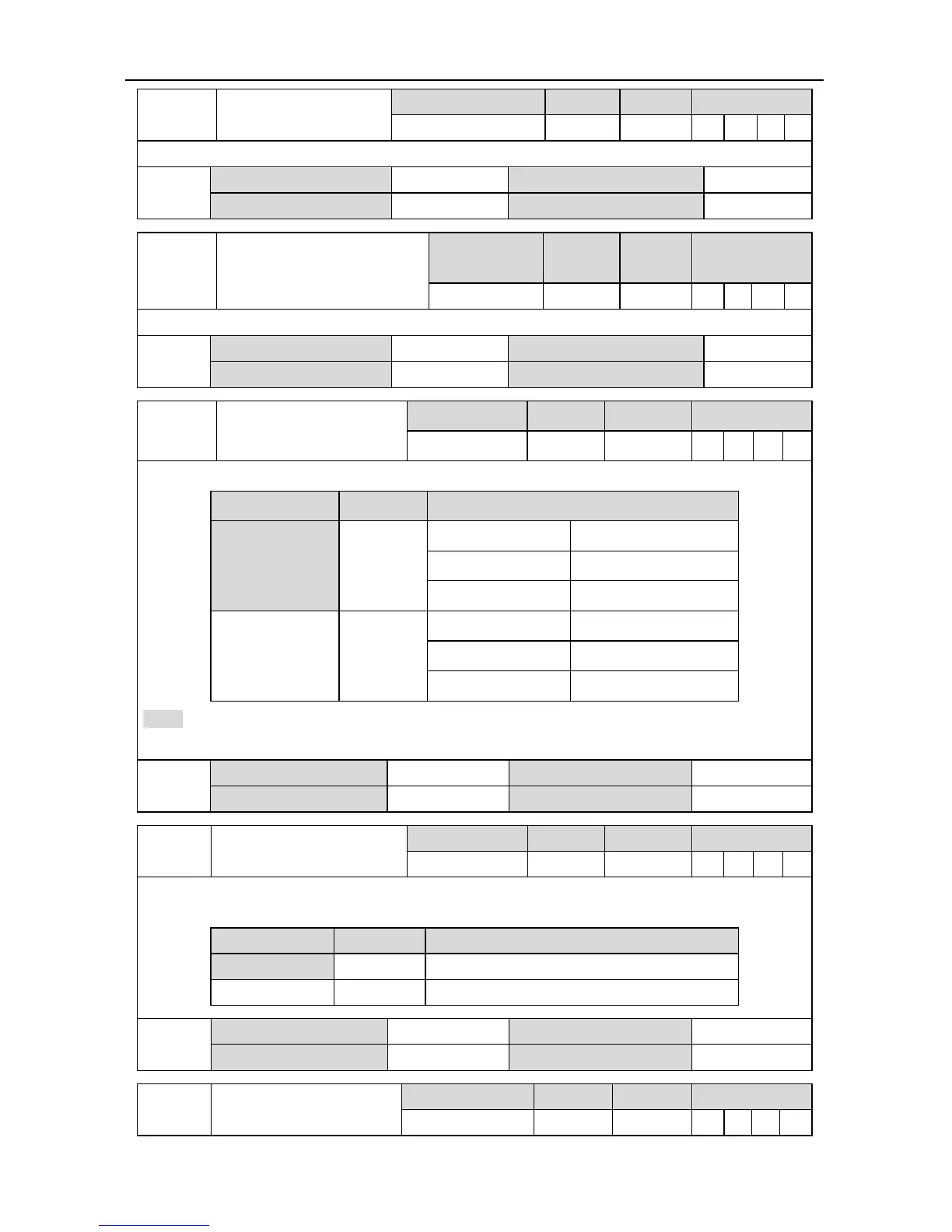
P4.13* Bus speed command
Setting range Default Unit Available mode
-20000~20000 0 r/min S
If P4.10 is 1, the drive speed command can be set via this parameter.
P4.13*
Data size 16bit Data format DEC
Modbus address 1826,1826 CANopen address 0x240D,0x00
P4.14* Bus torque command
Setting range Default Unit
Available
mode
-500.0~500.0 0.0 % T
If P4.10 is 1, the drive torque command can be set via this parameter.
P4.14*
Data size 16bit Data format DEC
Modbus address 1828,1829 CANopen address 0x240E,0x00
P4.15*
Switching command of
control mode
Setting range Default Unit Available mode
0~1 0 - P S T F
When P4.10 is 1, this parameter can be used to switch the control mode in hybrid control mode.
Setting value Function Actual control mode
[0] Disabled
Position/speed Position
Position/torque Position
Speed/torque Speed
1 Enabled
Position/speed Speed
Position/torque Torque
Speed/torque Torque
Note: After the updating of the control mode switching command, the actual switching process of
the drive and motor will act based on the setting of P0.90~P.92 and actual feedback state.
P4.15*
Data size 16bit Data format DEC
Modbus address 1830,1831 CANopen address 0x240F,0x00
P4.16* Gain switching command
Setting range Default Unit Available mode
0~1 0 - P S T F
If P4.10 is 1, this parameter can be used to set the gain switching command. When P2.22, P2.27,
P2.31 is 2, the actual controlled gain setting can be switched.
Setting value Function Actual gain
[0] Disabled 1
st
gain setting
1 Enabled 2
nd
gain setting
P4.16*
Data size 16bit Data format DEC
Modbus address 1832,1833 CANopen address 0x2410,0x00
P4.17*
Switching command of
electronic gear ratio
Setting range Default Unit Available mode
0~3 0 - P F
 Loading...
Loading...
