SV-DA200 series AC servo drives Faults and solutions
‐140‐
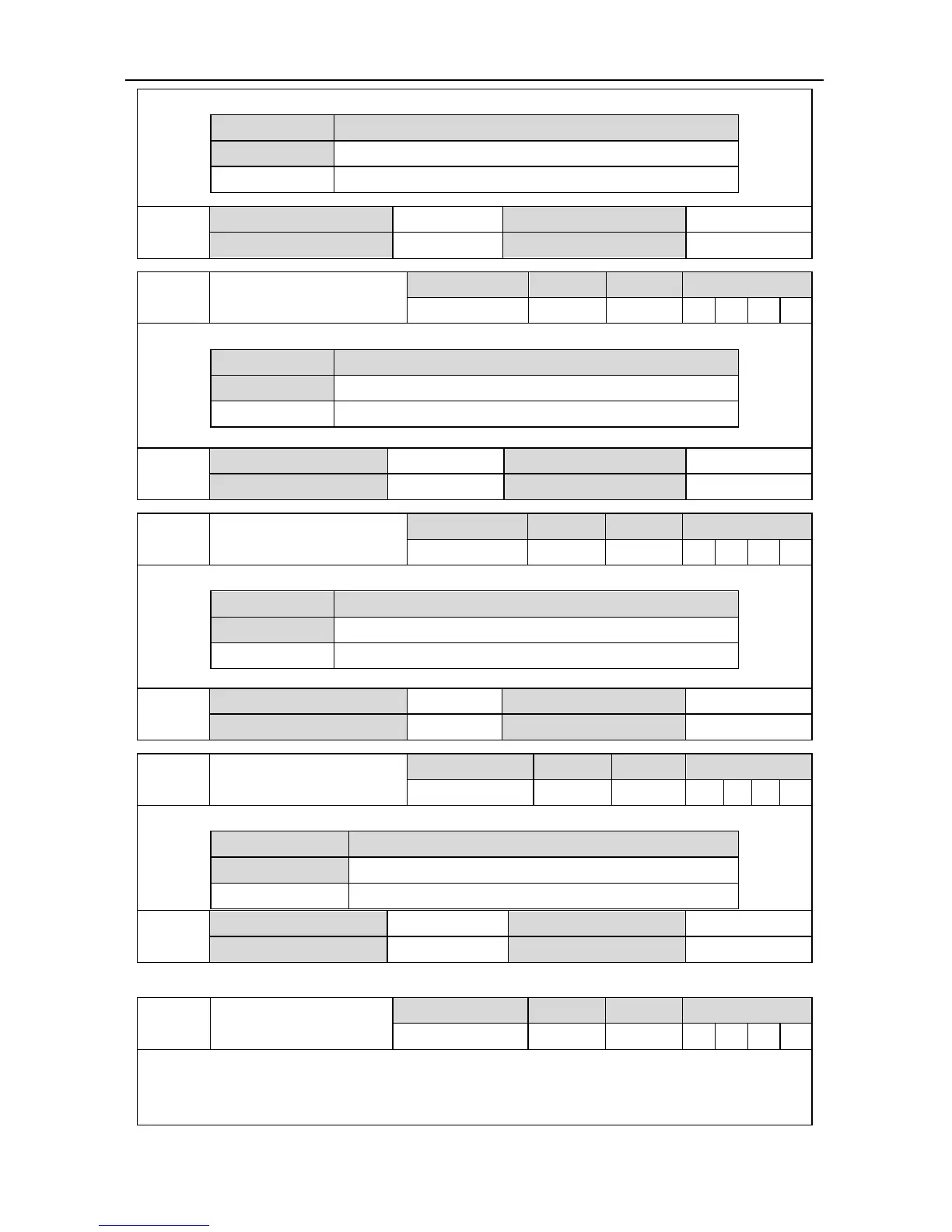
If P4.10 is 1, this parameter can be used to set the torque limit switching control.
Setting value Function
[0] Disabled
1 Enabled
P4.21*
Data size 16bit Data format DEC
Modbus address 1842,1843 CANopen address 0x2415,0x00
P4.22* External fault command
Setting range Default Unit Available mode
0~1 0 - P S T F
If P4.10 is 1, this parameter can be used to set the external fault command.
Setting value Function
[0] Disabled
1 Enabled
P4.22*
Data size 16bit Data format DEC
Modbus address 1844,1845 CANopen address 0x2416,0x00
P4.23* Emergency stop command
Setting range Default Unit Available mode
0~1 0 - P S T F
If P4.10 is 1, this parameter can be used to set emergency stop command.
Setting value Function
[0] Disabled
1 Enabled
P4.23*
Data size 16bit Data format DEC
Modbus address 1846,1847 CANopen address 0x2417,0x00
P4.24*
Input command of vibration
control switching
Setting range Default Unit Available mode
0~1 0 - P F
If P4.10 is 1, this parameter can be used to set vibration control switching of the drive.
Setting value Function
[0] Disabled
1 Enabled
P4.24*
Data size 16bit Data format DEC
Modbus address 1848,1849 CANopen address 0x2418,0x00
6.5.3 Extension and application
P4.30 Stop mode
Setting range Default Unit Available mode
0~3 0 - P S T F
When the servo is turned OFF and when fault alarm occurs, this parameter is used to set whether the
dynamic brake works or not and the state of the servo motor after stop:
 Loading...
Loading...
