SV-DA200 series AC servo drives Faults and solutions
‐141‐
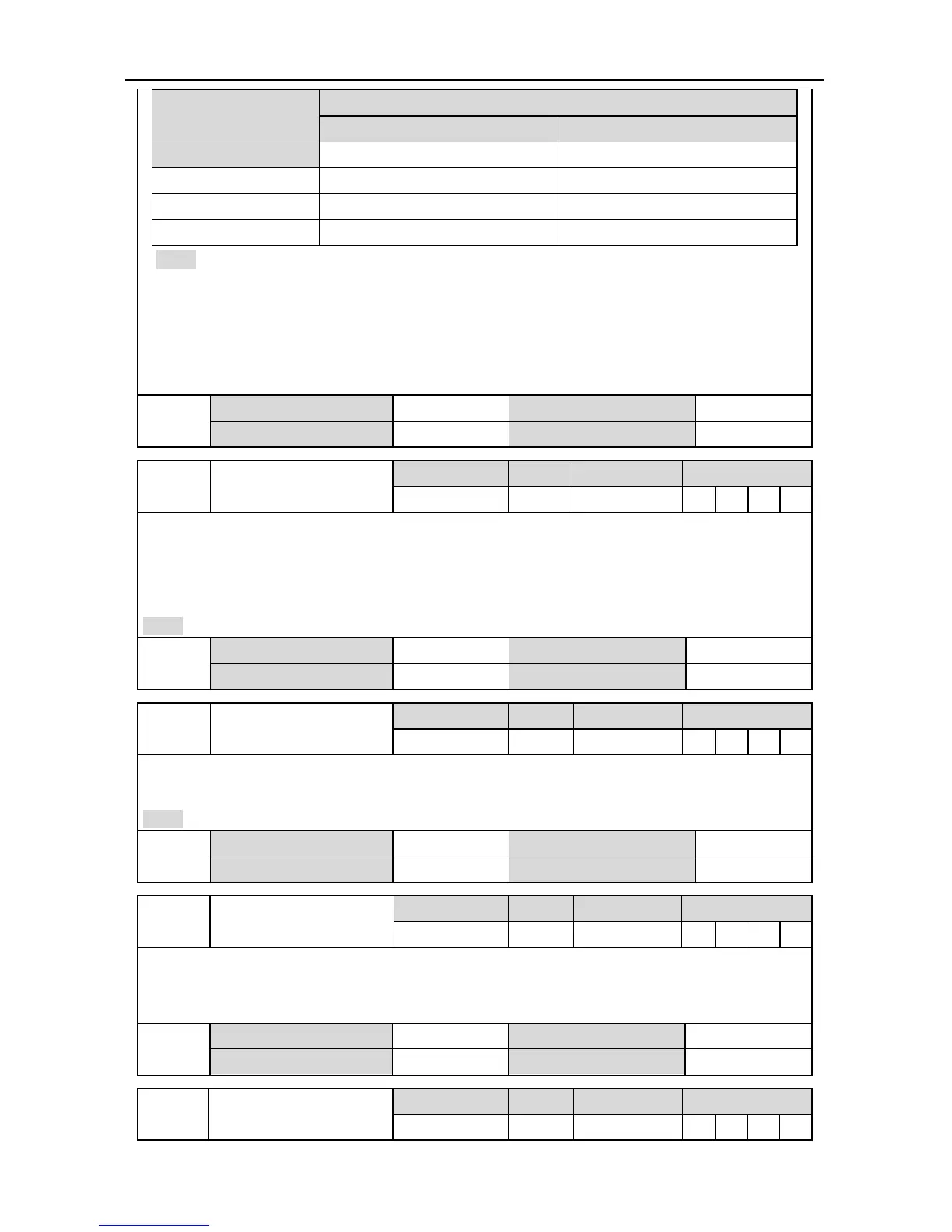
P4.30 Setting value
Action
During deceleration After stopping
[0] Coast to stop Keep the inertia operation state
1 Dynamic brake to stop Keep the inertia operation state
2 Dynamic brake stop Dynamic braking state
3 External dynamic brake acts Dynamic braking state
Note:
1. When P4.30 is set to 1, the dynamic brake works when motor speed is higher than the value
of P3.58 and does not work otherwise. After motor stops, dynamic brake will stop working.
2. If the running speed of servo motor is faster than rated speed, do not use the dynamic brake.
If the running speed is high with large inertia load, please use the dynamic brake with caution.
Do not start the dynamic brake frequently; otherwise, damage may occur to the servo drive.
P4.30
Data size 16bit Data format DEC
Modbus address 1860,1861 CANopen address 0x241E,0x00
P4.31 Max. speed limit
Setting range Default Unit Available mode
0~20000 5000 r/min P S T F
This parameter can be used to set the highest running speed of servo motor. If the absolute value
of the speed command is larger than the value of this parameter, the magnitude of the actual
speed setting will be limited by this parameter; the direction is the same with that of the original
speed command. This parameter is active in all modes.
Note: The default value of this parameter is related to the power level of the drive.
P4.31
Data size 16bit Data format DEC
Modbus address 1862,1863 CANopen address 0x241F,0x00
P4.32 Overspeed level
Setting range Default Unit Available mode
0~20000 6000 r/min P S T F
This parameter is used to set the overspeed level of the servo motor. When the rotation speed of
the motor exceeds this setting speed, overspeed fault alarm will be reported.
Note: The default value of this parameter is related to the power level of the drive.
P4.32
Data size 16bit Data format DEC
Modbus address 1864,1865 CANopen address 0x2420,0x00
P4.33
Pulse range of position
deviation
Setting range Default Unit Available mode
0~2
27
100000 reference unit P F
This parameter is used to set the alarm threshold for the position deviation (Er22-0). In position
or fully-closed loop mode, when the number of retention pulses exceeds this setting value,
position error fault will be alarmed.
P4.33
Data size 32bit Data format DEC
Modbus address 1866,1867 CANopen address 0x2421,0x00
P4.34
1
Brake overload detection
selection
Setting range Default Unit Available mode
0~2 0 - P S T F
 Loading...
Loading...
