SV-DA200 series AC servo drives Faults and solutions
‐143‐
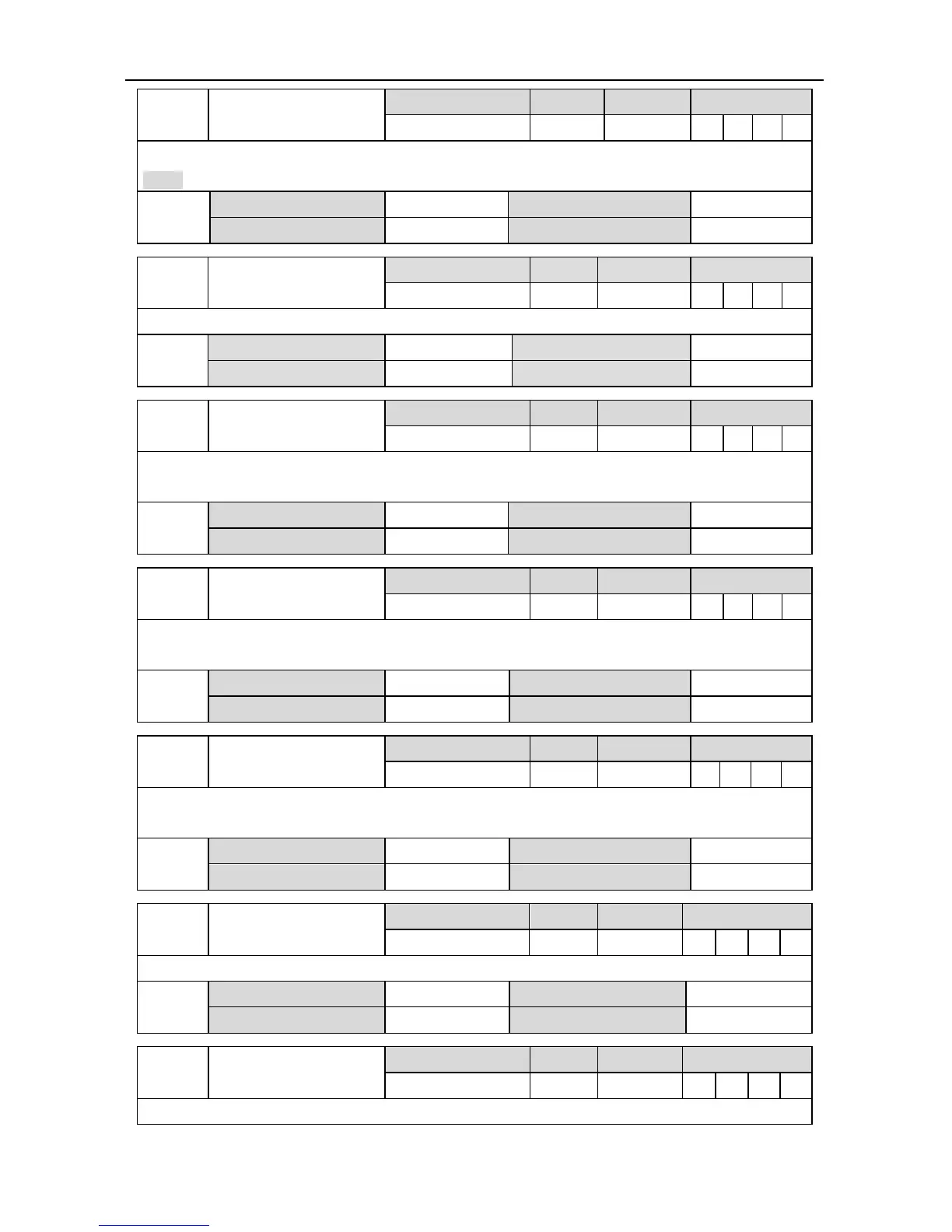
P4.41 Reverse speed limit
Setting range Default Unit Available mode
-20000~0 -20000 r/min P S T F
This parameter is used to set the max. speed limit of reverse speed command.
Note: The default value and setting range of the parameter is relative to the drive power level.
P4.41
Data size 16bit Data format DEC
Modbus address 1882,1883 CANopen address 0x2429,0x00
P4.42
Internal speed of high
resolution
Setting range Default Unit Available mode
-20000.0~20000.0 0.0 r/min P S T F
This parameter is used to set the internal speed of high resolution
P4.42
Data size 32bit Data format DEC
Modbus address 1884, 1885 CANopen address 0x242A, 0x00
P4.50
1
Offset of encoder Z
phase
Setting range Default Unit Available mode
0~(2
20
-1) 0 pulse P S T F
This parameter is used to set the output position of Z phase, and the setting value of the offset of
Z phase is the pulse of CCW direction.
P4.50
1
Data size 32bit Data format DEC
Modbus address 1900,1901 CANopen address 0x2432,0x00
P4.51
Switching time 1 of
torque limit
Setting range Default Unit Available mode
0~4000 0 ms/(100%) P S F
This parameter is used to set the transition time between switching from the first torque limit to
the second torque limit.
P4.51
Data size 16bit Data format DEC
Modbus address 1902,1903 CANopen address 0x2433,0x00
P4.52
Switching time 2 of
torque limit
Setting range Default Unit Available mode
0~4000 0 ms/(100%) P S F
This parameter is used to set the transition time between switching from the second torque limit
to the first torque limit.
P4.52
Data size 16bit Data format DEC
Modbus address 1904,1905 CANopen address 0x2434,0x00
P4.53
Current loop response
adjustment
Setting range Default Unit Available mode
10.0~200.0 100.0 % P S T F
This parameter is used to set the adjustment coefficient of current loop response width.
P4.53
Data size 16bit Data format DEC
Modbus address 1906,1907 CANopen address 0x2435,0x00
P4.54
1
Initialization time after
power on
Setting range Default Unit Available mode
0~200000 0 ms P S T F
This parameter is used to set the delay time before allowing servo enabling after power on
 Loading...
Loading...
