SV-DA200 series AC servo drives Faults and solutions
‐201‐
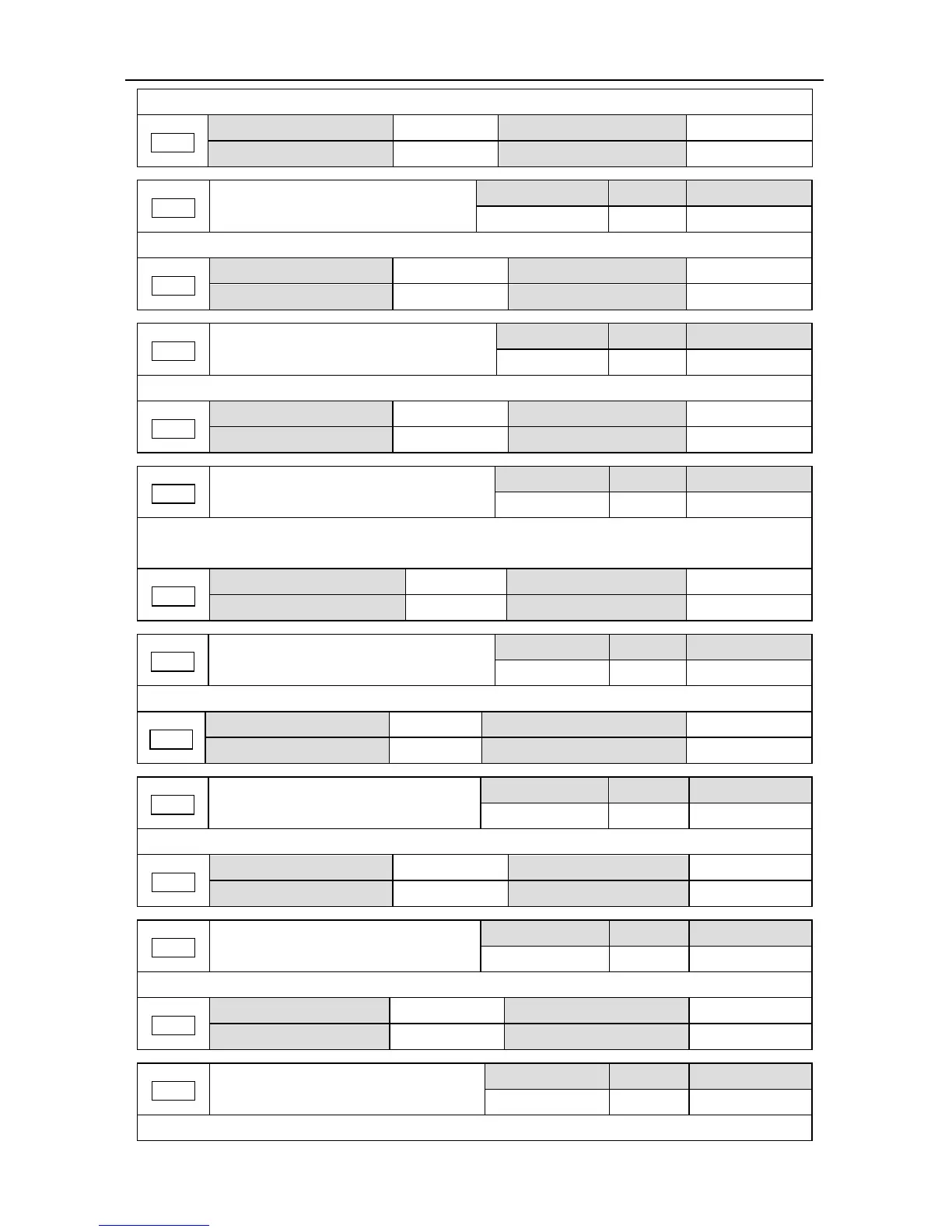
Compensation torque of disturbance observer
R0.48
Data size 32bit Data format DEC
Modbus address 4100,4101 CANopen address 0x3030,0x00
R0.49
Compensation value of
fully-closed-loop vibration suppressor
Display range Precision Unit
-9999.9~9999.9 0.1 r/min
Compensation value of fully-closed-loop vibration suppressor
R0.49
Data size 32bit Data format DEC
Modbus address 4102,4103 CANopen address 0x3031,0x00
R0.51 Observe load inertia ratio in real time
Display range Precision Unit
0~10000 1 %
Display load inertia ratio observed in real time.
R0.51
Data size 16bit Data format DEC
Modbus address 4106,4107 CANopen address 0x3033,0x00
R0.52
Linear encoder (2
nd
encoder) position
feedback accumulation (32-bit number)
Display range Precision Unit
-(2
31
-1)~(2
31
-1) 1 pulse
Linear encoder (2
nd
encoder) position feedback accumulation, 32-bit number, fast reading speed.
If the data range exceeds 32-bit, use R0.57.
R0.52
Data size 32bit Data format DEC
Modbus address 4108,4109 CANopen address 0x3034,0x00
R0.53
Gantry synchronization position
deviation
Display range Precision Unit
-(2
31
-1)~(2
31
-1) 1 reference unit
Gantry synchronization position deviation.
R0.53
Data size 32bit Data format DEC
Modbus address 4110,4111 CANopen address 0x3035,0x00
R0.54
Linear encoder (2
nd
encoder)position
feedback value
Display range Precision Unit
0~2
23
1 pulse
Display the feedback position of linear encoder (2
nd
encoder).
R0.54
Data size 32bit Data format DEC
Modbus address 4112,4113 CANopen address 0x3036,0x00
R0.55
Encoder circle number offset after
clearing multi-turn position
Display range Precision Unit
-(2
31
-1)~(2
31
-1) 1 -
Display the offset of encoder circles after zero clearing of multi-turn position.
R0.55
Data size 32bit Data format DEC
Modbus address 4114,4115 CANopen address 0x3037,0x00
R0.56
Encoder feedback value offset after
clearing multi-turn position
Display range Precision Unit
-(2
31
-1)~(2
31
-1) 1 pulse
Display the offset of encoder feedback value after zero clearing of multi-turn position.
 Loading...
Loading...
