SV-DA200 series AC servo drives Appendix
‐252‐
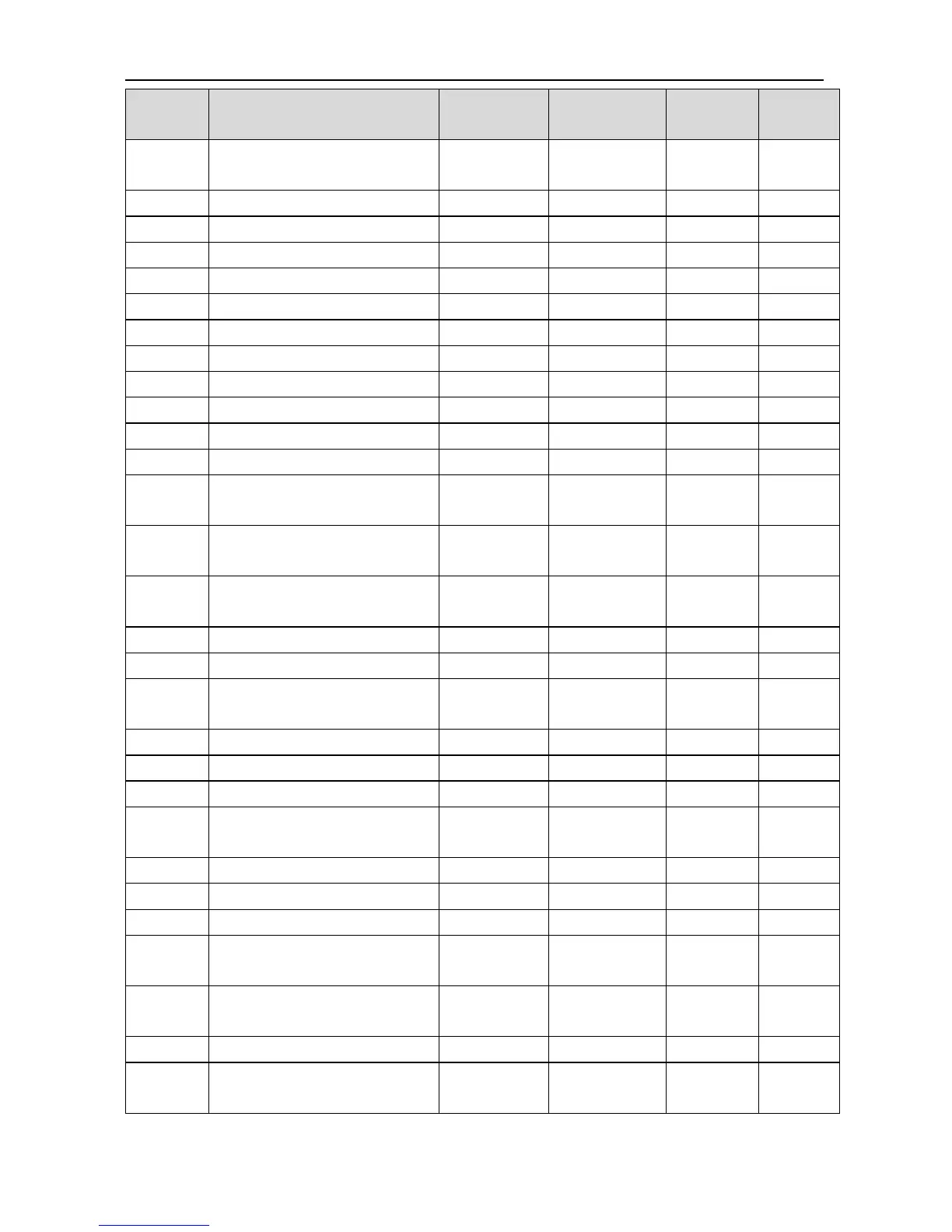
Function
code
Name Unit Range Default
Available
Mode
P2.06
2
nd
speed integration time
constant
ms 0.1~1000.0 1000.0 PSTF
P2.07 2
nd
position gain 1/s 0.0~3276.7 57.0 PF
P2.08 2
nd
speed detection filter Hz 100~5000 5000 PSTF
P2.09 2
nd
torque filter ms 0.00~25.00 0.84 PSTF
P2.10 Speed feed-forward gain % 0.0~100.0 0.0 PF
P2.11 Speed feed-forward filter time ms 0.00~64.00 0.50 PF
P2.12 Torque feed-forward gain % 0.0~100.0 0.0 PSF
P2.13 Torque feed-forward filter time ms 0.00~64.00 0.00 PSF
P2.14 1
st
IPPI coefficient % 0~1000 100 PSTF
P2.15 2
nd
IPPI coefficient % 0~1000 100 PSTF
P2.20 2
nd
gain setting - 0~1 1 PSTF
P2.22 Position control switching mode - 0~9 0 PF
P2.23
Delay time of position control
switching
ms 0~10000 0 PF
P2.24
Switching level of position
control
- 0~20000 0 PF
P2.25
Switching delay of position
control
- 0~20000 0 PF
P2.26 Switching time of position gain ms 0~10000 0 PF
P2.27 Switching mode of speed control - 0~5 0 S
P2.28
Delay time of speed control
switching
ms 0~10000 0 S
P2.29 Switching level of speed control - 0~20000 0 S
P2.30 Switching delay of speed control - 0~20000 0 S
P2.31 Switching mode of torque control - 0~3 0 T
P2.32
Delay time of torque control
switching
ms 0~10000 0 T
P2.33 Switching level of torque control - 0~20000 0 T
P2.34 Switching delay of torque control - 0~20000 0 T
P2.41
2
Disturbance observer valid - 0~2 0 PSTF
P2.42
Disturbance observer
compensation gain
% 0~100 0 PSF
P2.43
Disturbance observer cut-off
frequency
ms 0.00~25.00 0.53 PSF
P2.44 Torque command offset % -500.0~500.0 0.0 PSTF
P2.50
2
Fully-closed loop vibration
suppressor valid
- 0~2 0 PSF
 Loading...
Loading...
