SV-DA200 series AC servo drives Faults and solutions
‐88‐
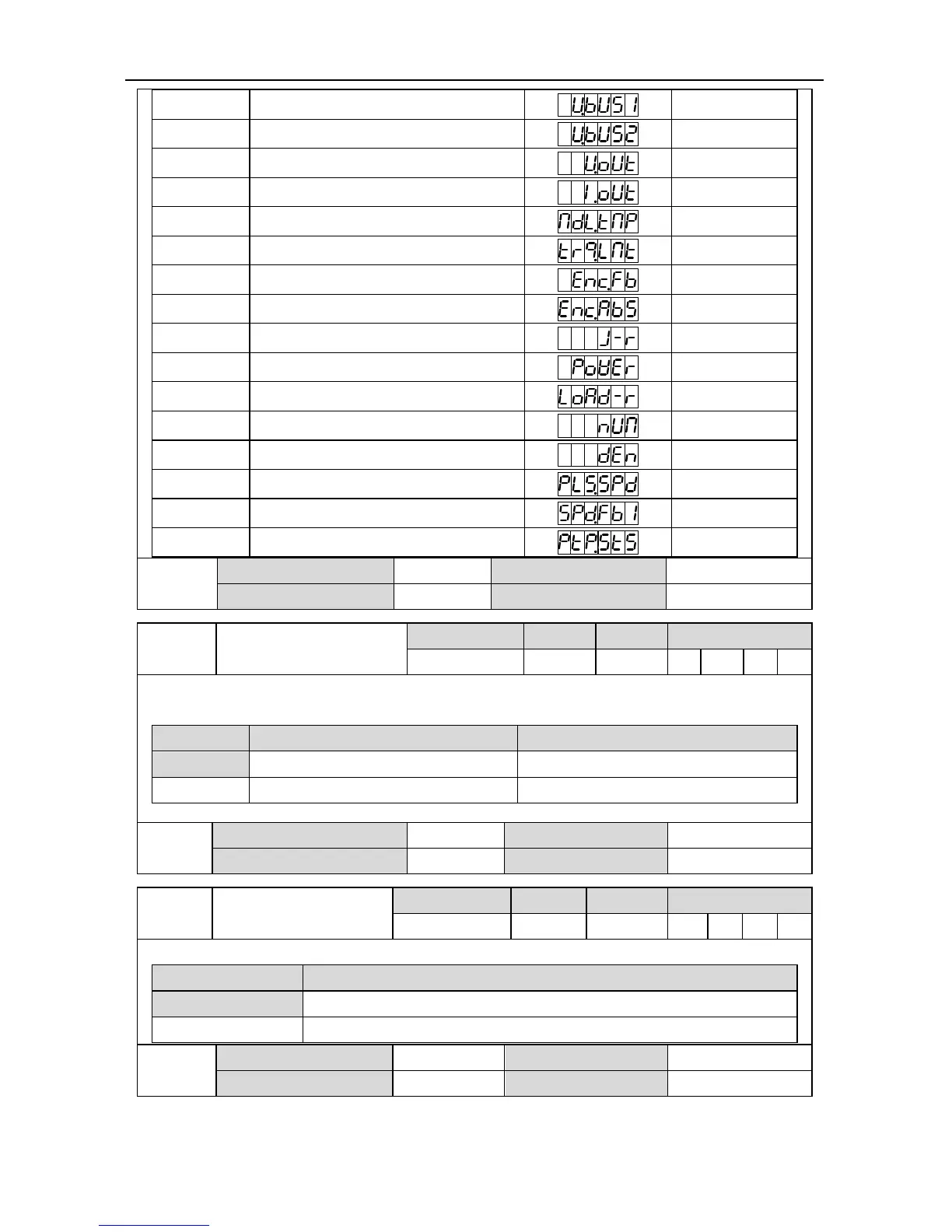
7 Main circuit DC voltage V
8 Voltage of control power V
9 Output voltage Vrms
10 Output current Arms
11 Drive temperature ℃
12 Torque limit %
13 Encoder feedback value pulse
14 Rotor position to Z pulse pulse
15 Load inertia ratio %
16 Output power %
17 Motor load rate %
18 Molecule of actual electronic gear -
19 Denominator of actual electronic gear -
20 Pulse speed command r/min
21 Instant speed r/min
22 PTP state -
P0.15
Data size 16bit Data format DEC
Modbus address 1030,1031 CANopen address 0x200F, 0x00
P0.16
Parameter modification
operation locked
Setting range Default Unit Available mode
0~1 0 - P S T F
This parameter is used to mask the parameter setting function and thus to avoid incorrect
modification of the parameters by the user::
Setting value Operation Communication operation
[0] Parameter modification valid Parameter modification valid
1 Parameter modification invalid Parameter modification valid
P0.16
Data size 16bit Data format DEC
Modbus address 1032,1033 CANopen address 0x2010, 0x00
P0.17 EEPROM write mode
Setting range Default Unit Available mode
0~1 0 - P S T F
This parameter is used to set the EEPROM write mode
Setting value Command pulse input
[0] Saved one by one (automatic saved after modification)
1 Bulk saving (be saved in bulk by P4.91 after modification)
P0.17
Data size 16bit Data format DEC
Modbus address 1034,1035 CANopen address 0x2011, 0x00
 Loading...
Loading...
