SV-DA200 series AC servo drives Faults and solutions
‐89‐
P0.18* Factory password
Setting range Default Unit Available mode
0~65536 0 - P S T F
This parameter is used to view and modify the menu.
P0.18*
Data size 16bit Data format DEC
Modbus address 1036,1037 CANopen address 0x2012, 0x00
6.1.2 Position control
P0.20
1
Position command
selection
Setting range Default Unit Available mode
0~4 0 - P F
This parameter is used to select the position command source.
Setting value Position command source
[0] Pulse input
1 Communication bus input
2 PTP (point-to-point) control
3 Factory use
4 The second encoder input
P0.20
1
Data size 16bit Data format DEC
Modbus address 1040,1041 CANopen address 0x2014, 0x00
P0.22
1
Pulse number per motor
resolution
Setting range Default Unit Available mode
0~2
23
10000 reference unit P F
This parameter is used to set the number of pulses per motor resolution.
Note: P0.22 is set to a non-zero value, the setting of P0.25~P0.29 is invalid. If 17-bit and 20-bit
encoder is used, the more pulse number can be set for the higher precision.
P0.22
1
Data size 32bit Data format DEC
Modbus address 1044,1045 CANopen address 0x2016, 0x00
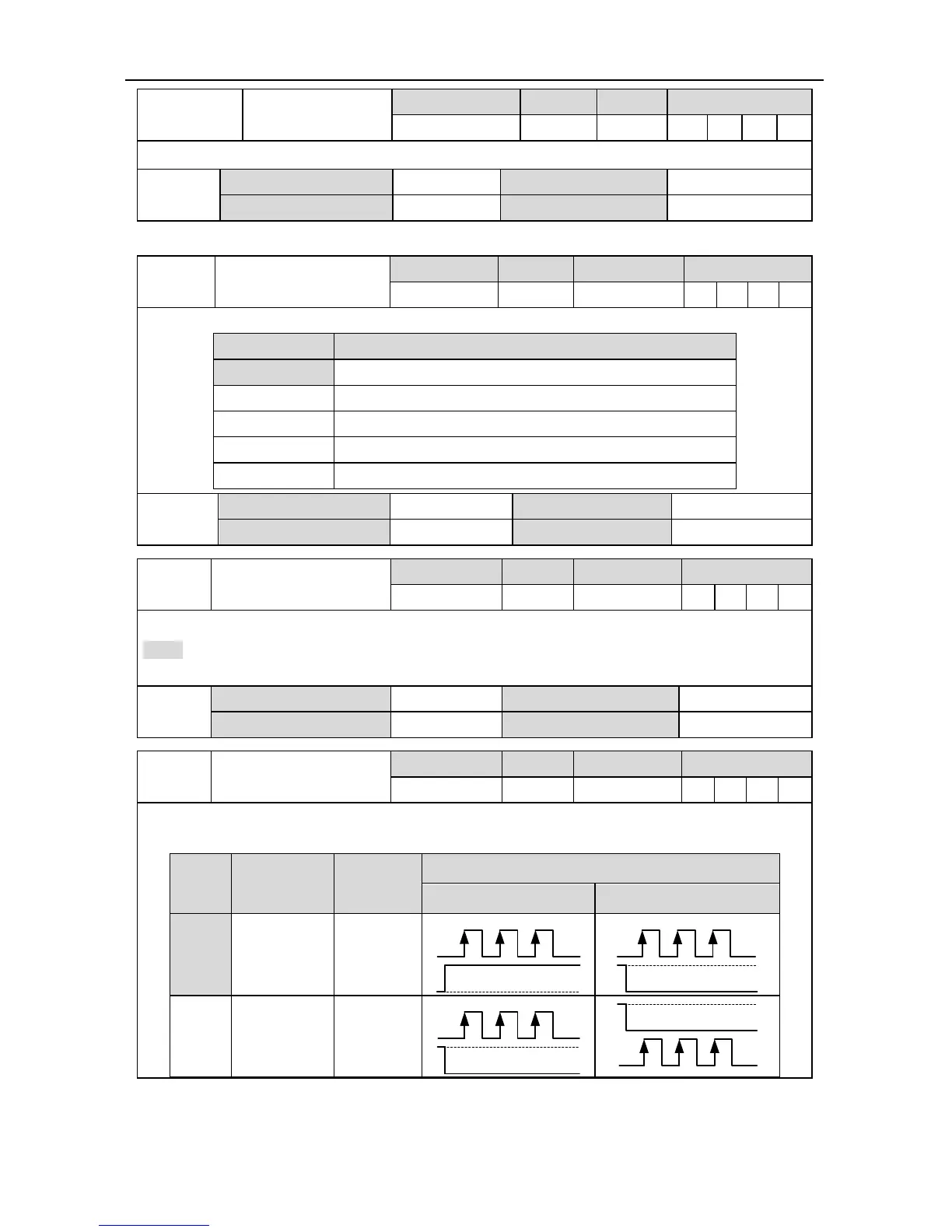
P0.23
1
Pulse input form
Setting range Default Unit Available mode
0~2 0 - P F
This parameter is used to set the manner of pulse input.
There are 3 types of pulse input manners:
Setting
value
Pulse input
form
Signal form
Shown in the picture
CCW CW
[0] Pulse + mode Pulse+Sign
1
FWD/REV
pulse mode
CW+CCW
 Loading...
Loading...
