100
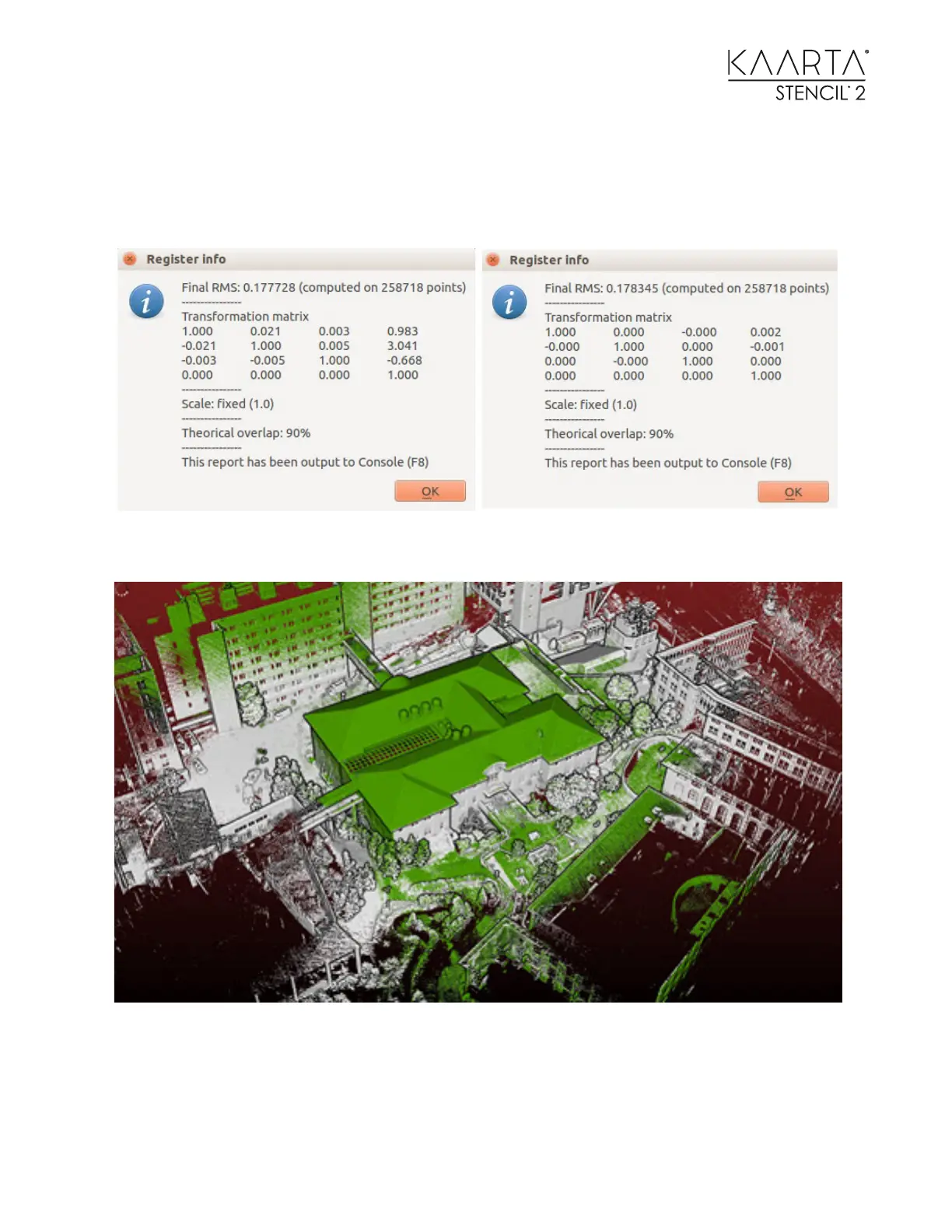
You may need to give the ICP matching multiple tries. Observe the example below where it was
run twice. As in the figures, the transformation matrix shows some higher values on the last
column after the first try. After the second try, the values become very small, indicating good
coverage matching.
You can now merge the two clouds and save the resulting point cloud.