76
LF.42
The integral gain is responsible for correcting long term average error in speed
as well as providing increased control and rigidity at lower speeds for starting
and stopping. The integral gain is split into two values one for acceleration and
constant speed (A.LF.32) and one for deceleration (d.LF.32).
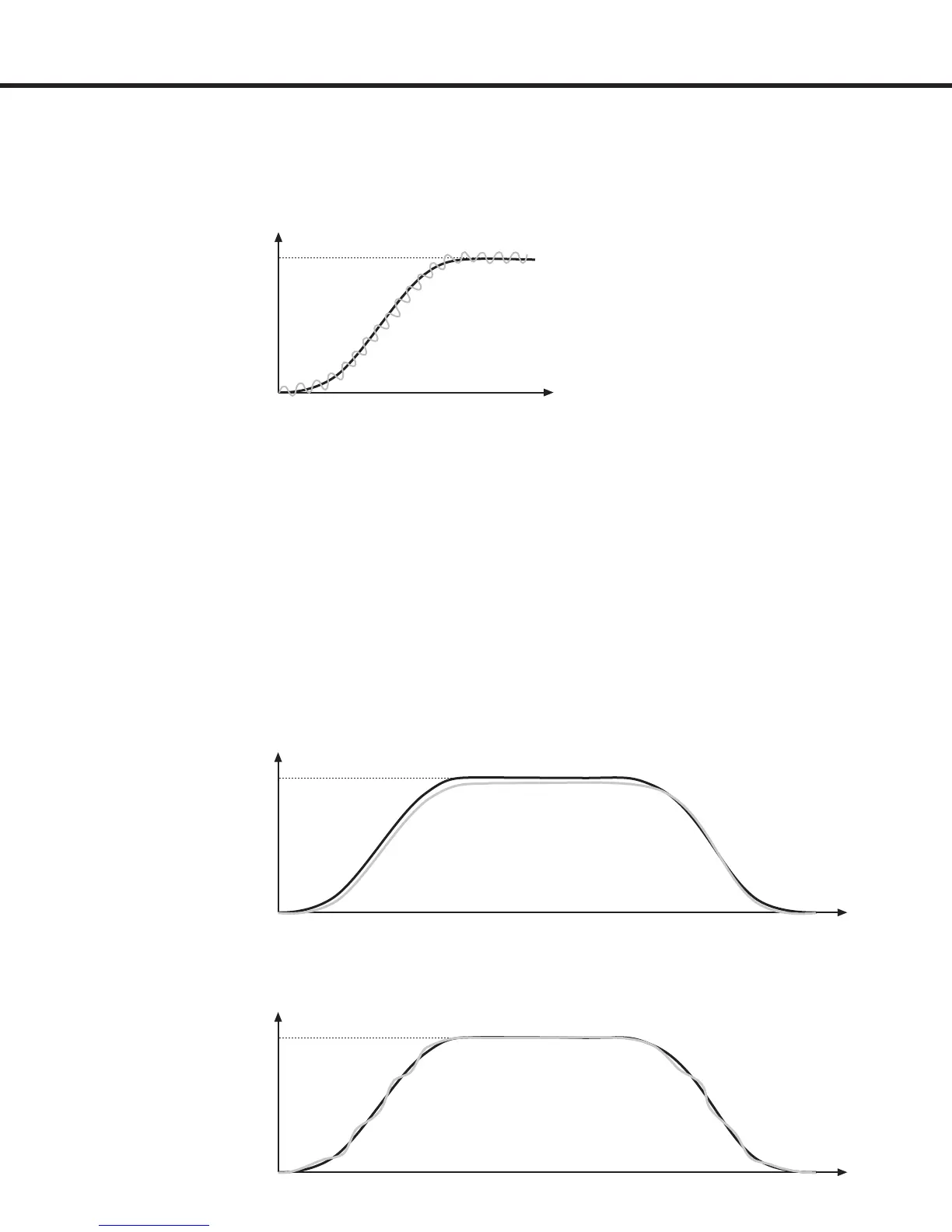
LF.32 provides an overall gain value for all speeds of operation. If this value
becomes too high, greater than 600, it can result in torque pulsations during
acceleration and deceleration. If the value becomes too low, less than 250, the
tracking of the command speed will suffer and the system may not reach contract
speed.
LF.32 = 100
Speed lags the command, sometimes does not reach contract speed, under
shoots the oor. Raise in steps of 100 until better control is achieved.
LF.32 = 1500
Acceleration is jerky, bunching or spotting occurs during deceleration. Lower
LF.32 in steps of 200. A good range is 200-600.
LF.42
Integral Gain
LF.42
Initial Start Up
LF.31 = 5000
Loud audible noise or vibration from the motor, lower the value in steps of 500
until the noise/vibration stops.

 Loading...
Loading...
















