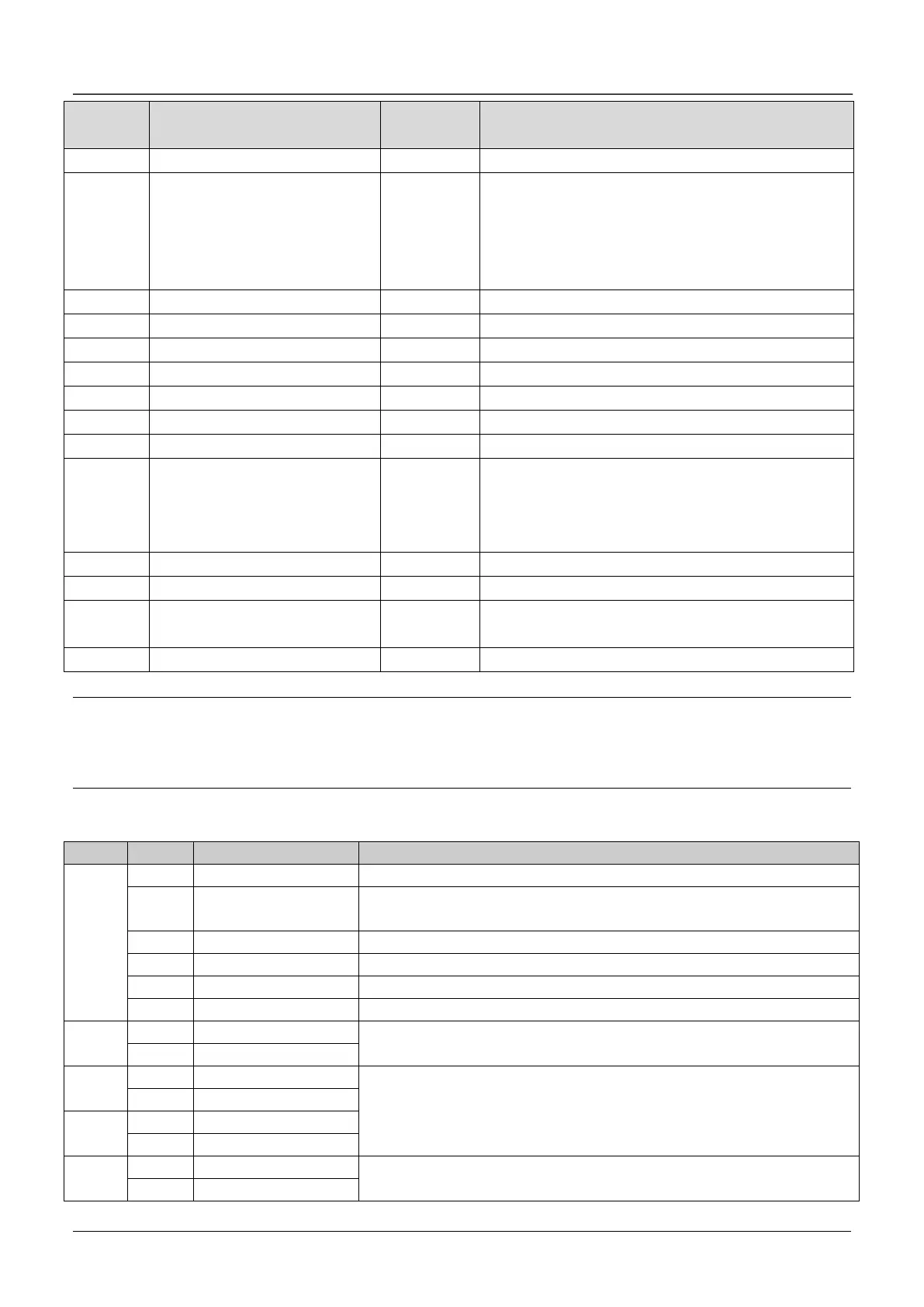
The main setting frequency:
In the common operation mode, the channel of main
setting is serial communication, it tack effects if the
bit8 of control word 1 is set on. Whether it saves or
not depends on the setting in A2.03
Operation frequency setting
Digital closed loop setting
Takes effects after the closed loop is enabled
Pulse closed loop setting
Analog output AO1 setting
Analog output AO2 setting
Digital output DO setting
Frequency Proportion setting
Virtual terminal control setting
Bit~bit6: X1~X6. Corresponding to the ON state of
the bits in A6.24
Bit10~bit13: Y1/Y2/RO1/RO2, They are enabled
when A6.14~A6.17=17
Set the acceleration time
Set the deceleration time
In the torque mode, the torque setting channel is
serial port
Notes:
1.
When read control parameters,it will return the value which is rewrote in the previous communication.
2. In control parameters,the preset value,range of input/output setting value and decimal point scaling should
refer to the corresponding function code
The bits for the control command word 1 are defined as follows:
Start VFD(enable when jog is disable)
Stop according to the preset deceleration time
(enable when jog is disable)
Coast to stop and VFD display external fault
Set the operating direction when run command is enable
No action when bits for jog forward and reverse are enable at the same
time, and jog stop when both are disable at the same time.
The bit5~bit0 of control word 1 are enable when this bit is enable.

 Loading...
Loading...
