Braking torque limit is the torque limit in generating
condition.
In setting value,100% is corresponding to drive’s
rated torque.
A5.12 Reference torque selector
0: Digital torque setting
1:AI1
2: AI2
3: Keyboard potentiometer
4: Terminal DI (Pulse) setting
A5.13 Digital torque
setting
A5.14 Switch point from
speed to torque
A5.15 Delay for switch
speed and torque
A5.16 Filter for torque
setting
A5.17 and A5.18 are the parameters for PI regulator
of current loop. Increasing P or decreasing I of
current loop can speed up the dynamic response of
torque. Decreasing P or increasing I can enhance
the system’s stability.
Note:
For most applications, there is no need to adjust the
PI parameters of current loop,so the users are
suggested to change these parameters carefully.
6.7 Group A6
A6.00 Multi-function terminal X1
A6.01 Multi-function terminal X2
A6.02 Multi-function terminal X3
A6.03 Multi-function terminal X4
A6.04 Multi-function terminal X5
A6.05 Multi-function terminal X6
The functions of multi-function input terminal X1~X6
are extensive. You can select functions of X1~X6
according to your application by setting
A6.00~A6.05. Refer to Table 6-1.
Note:
Can not set the same function for different terminals.
For example, if X1 is set as forward function【01】,
then the others terminals can not be set as the
same function.
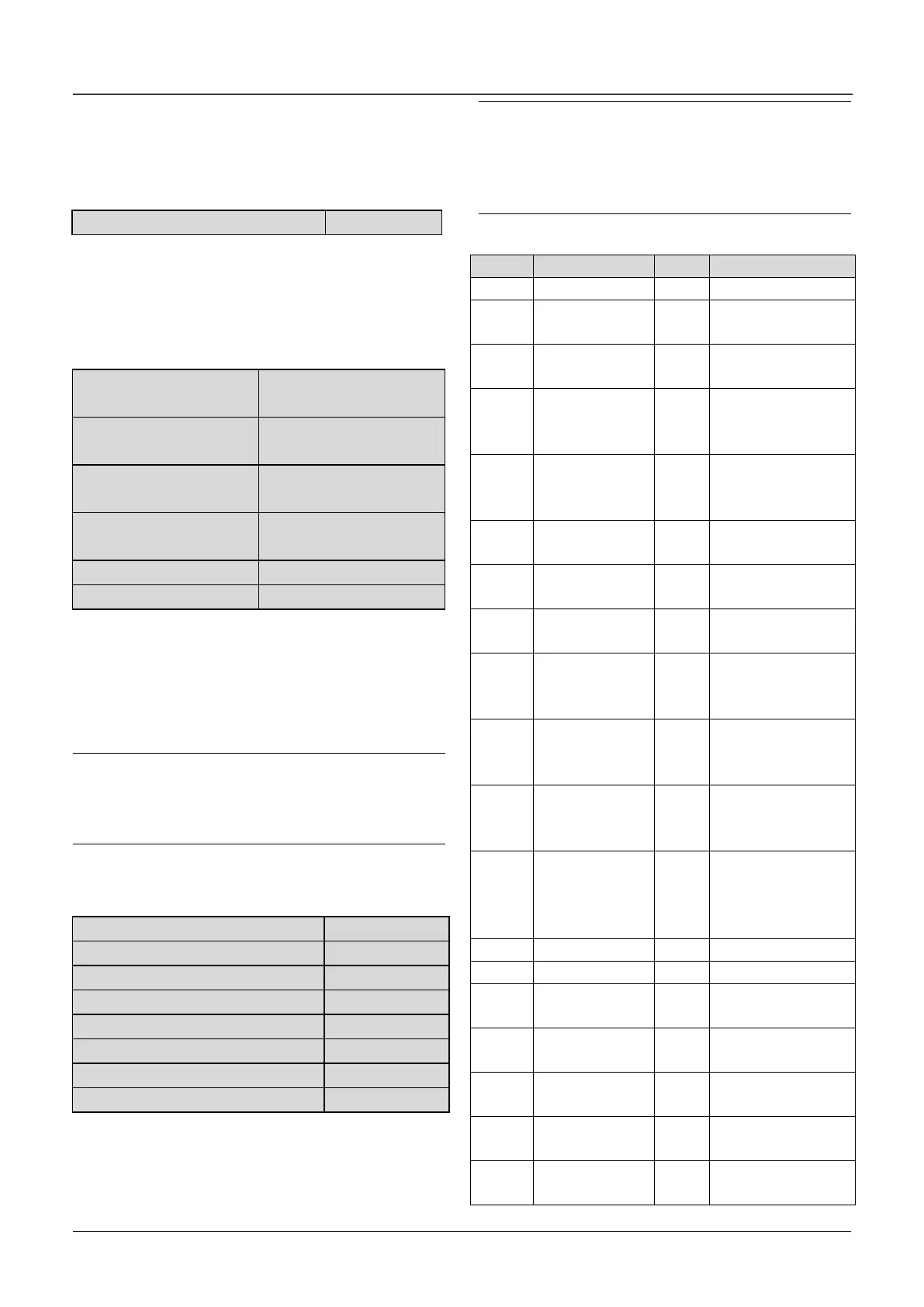
Table 6-1 Multi-function selection
External
RESET signal
input
External fault
signal input
External
interrupt signal
input
DC injection
braking command
Switch to
terminal control
Switch to
communication
control
Main reference
frequency via
AI1
Main reference
frequency via AI2
Main reference
frequency via
potentiometer
Main reference
frequency via DI
Auxiliary
reference
frequency
invalid
Multi-closed loop
reference 1
Multi-closed
loop reference 2
Multi-closed loop
reference 3
Multi-closed
loop reference 4

 Loading...
Loading...
